フライトコントローラ ardupilot2.8 設定控え 2020/07/10 作成
Mission Planner を使った設定について解説 ドローン編 ヘリはこちら
今回購入した物は、GPSや無線通信ユニット(国内では違法らしい?)、電源センサーなどがセットになっている。
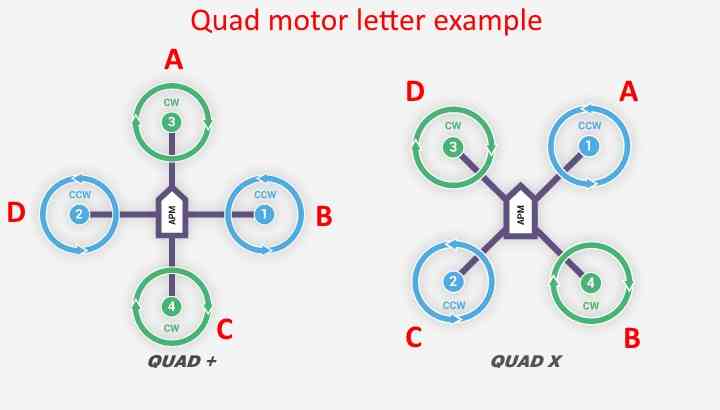
まずは、X型のドローンに搭載し、飛行までの手順をメモします。
プロポは、フタバの10JとR3008SBのセットを使用。
CH5:SWG CH6:VR CH7:SWA CH8:SWC に設定しました。
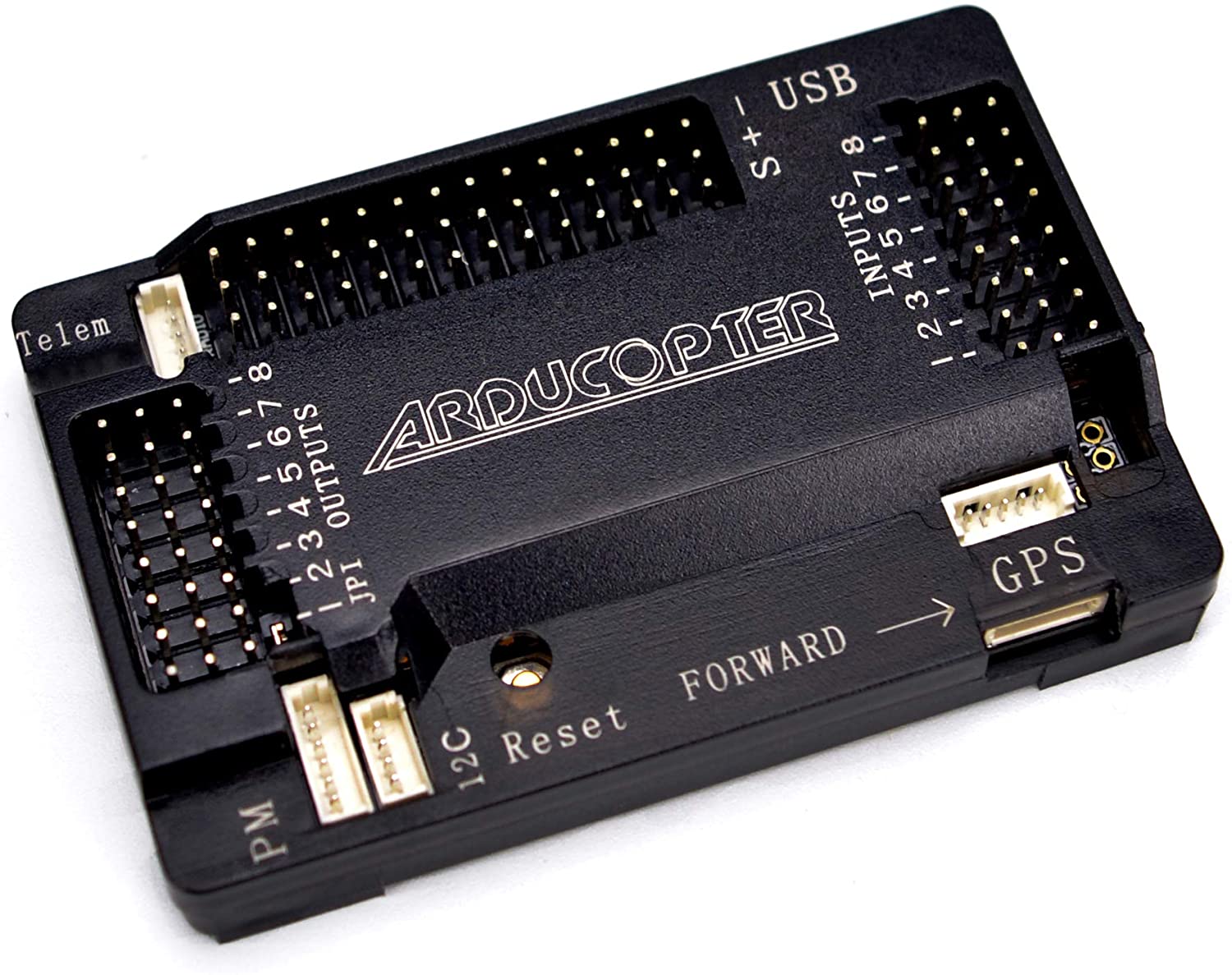
受信機とFCの入力を接続します。(1~8ch)
FCとESCの接続は、下図を参考にする。
JP1:ジャンパーキャップを差し込むと、コントローラーボードにESCから電力を供給できます。
MissionPlanner をインストールします。https://firmware.ardupilot.org/Tools/MissionPlanner/

起動し、初期設定からファームウェアインストールを選択します。
このとき、右上の接続はまだしない。
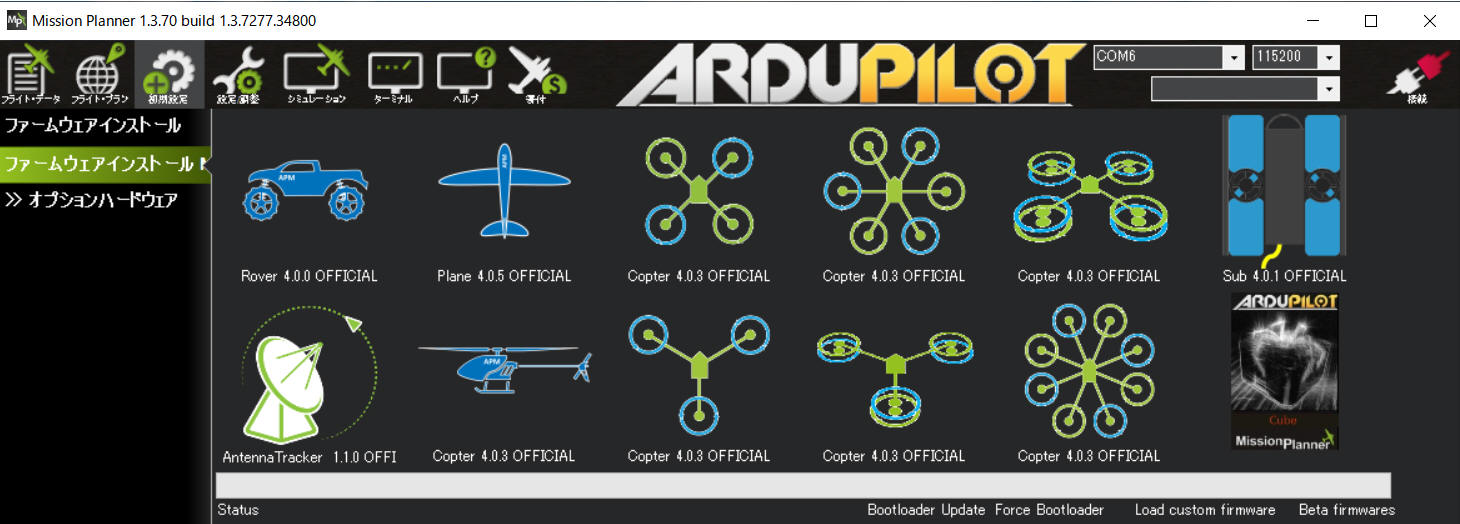
FCとUSBで接続し、ファームウェアを転送します。
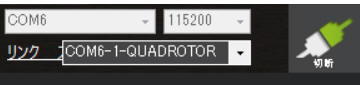
「終了」が表示されたら、右上の接続をクリックします。
メニューを順番に設定していきます。
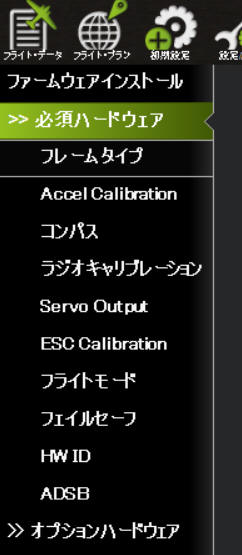
キャリブレーション
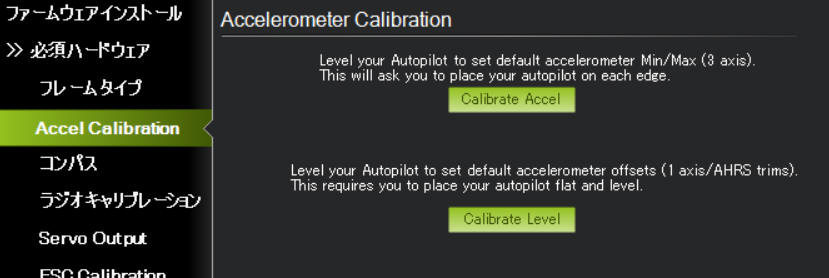
上のキャリブレーションは、3軸周りの補正を

RIGHT:USBコネクタが上に来るように、機体を静止させる。
DOWN:機体を下向きにする。 UP:上向き BACK:裏返しにする。
全面が終了すると、下のどちらかが表示される。途中で放置したり、何らかの失敗があると、下左図が表示される。

送信機の電源をONにし、「ラジオキャリブレーション」を実行する。

この時、左縦の「Pich」は逆の動きをするが、そのままで良い。他の3軸は、スティックの動きと同じになっている事を確認する。
「Servo Output」は、ESC接続のCH1~4は、Armしないと動かないので、注意。
※ARM後の最低回転数の変更(スロットルレバー最小で回転しないようにする)
「設定/調整」「フルパラメータ」でMOT_SPIN_ARMEDを見つけ、その値を変更します。 0(デフォルト値は70)になり、アイドルスピード機能が停止されます。保存するには、パラメータの書き込みをクリックすることを忘れないでください。

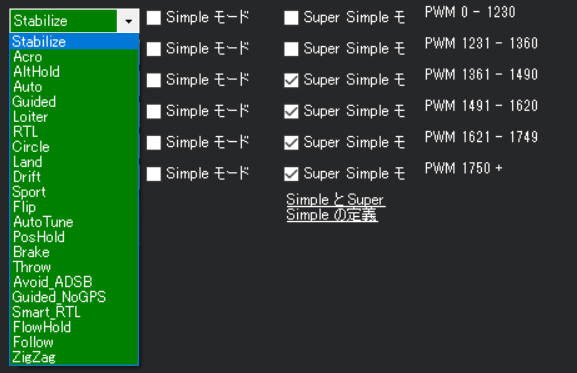
「フライトモード」の説明
最初の設定は、3ポジションSWに
1:機体安定モード 2:高度ホールド 3:GPSホールド を指定します。
| No. | モード | 説明 |
| 1 | Stabilize | 機体を安定化します。高度、位置の固定は、手動で行います。 |
| 2 | Acro | 高度のみ保持し、機体の安定は保証されない。 |
| 3 | AltHold | 機体安定に加え、高度維持を自動で制御します。着陸後にモータ停止する事は出来ません。 |
| 4 | Auto | 事前に設定した飛行コースを、自動で航行します。離陸後に指定します。 |
| 5 | Loiter | GPSを使って、指定の位置にとどまります。着陸後にモータ停止する事は出来ません。 |
| 6 | RLT | 離陸場所に戻ります。着陸も含まれます。 (Return-to-Launch) |
| 7 | Circle | 既定ポイントを中心に旋回します。 |
| 8 | Land | 直下に降下し、着陸します。 |
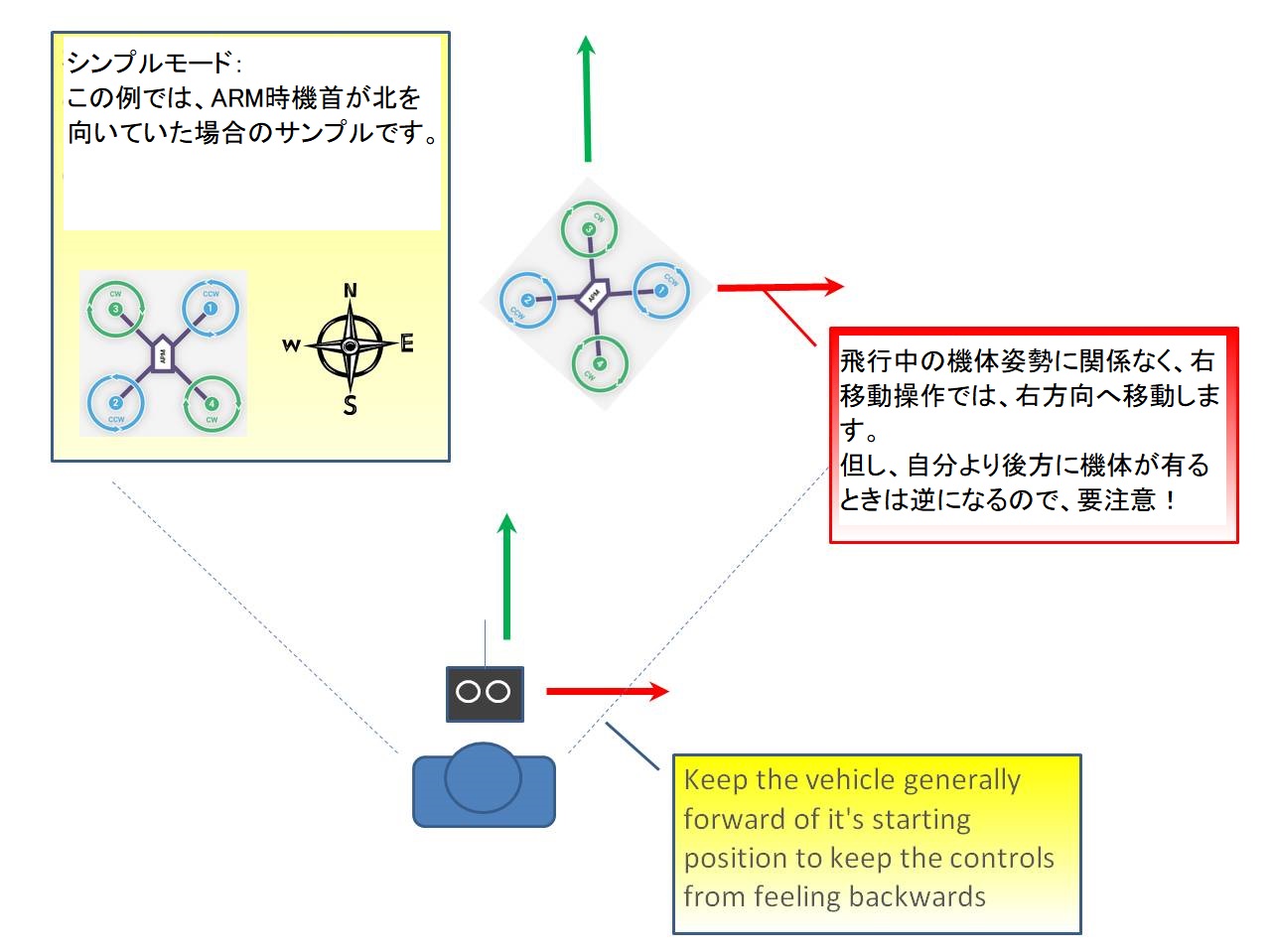
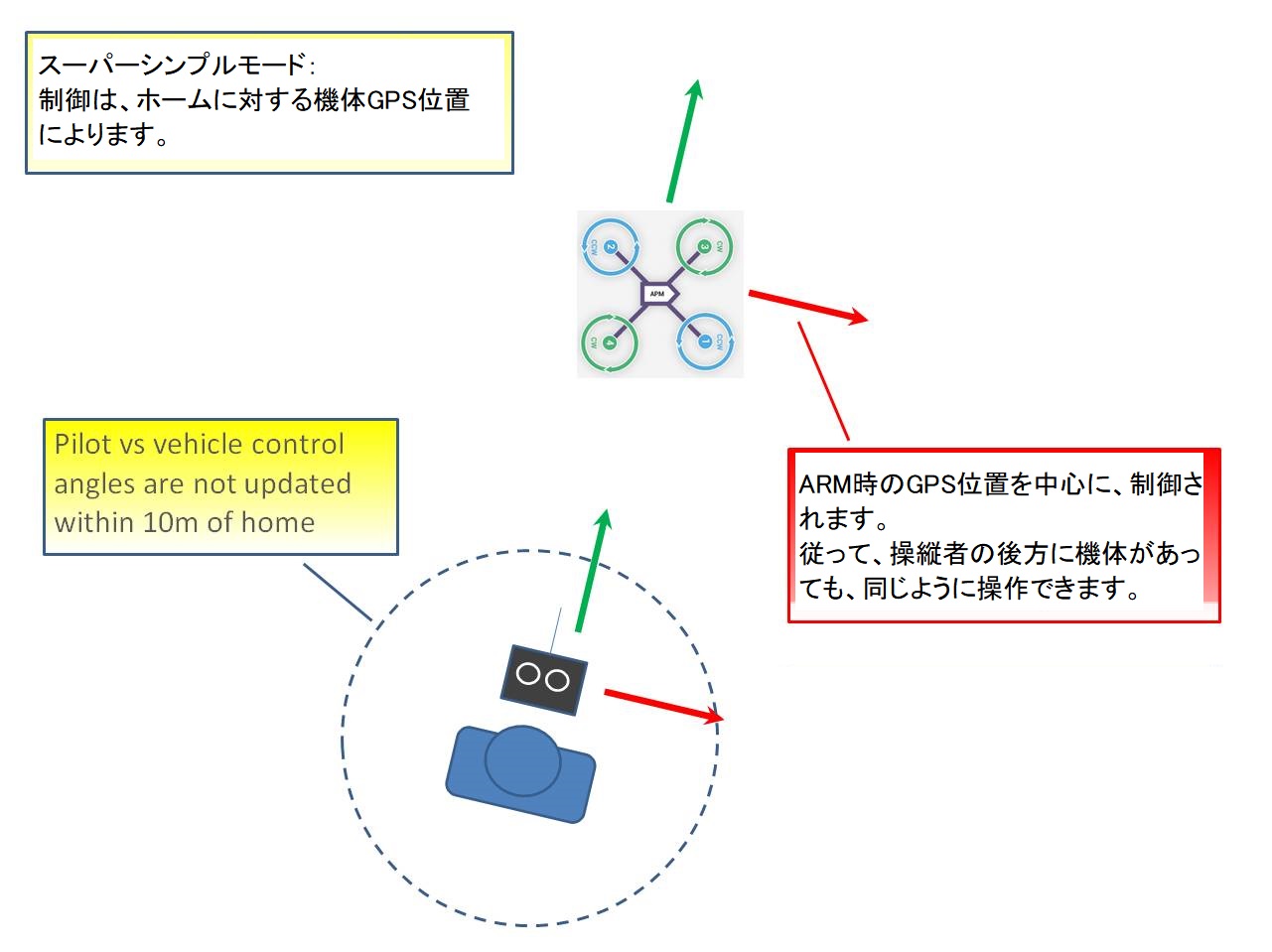
「Simpleモード」と「Super Simpleモード」の違い
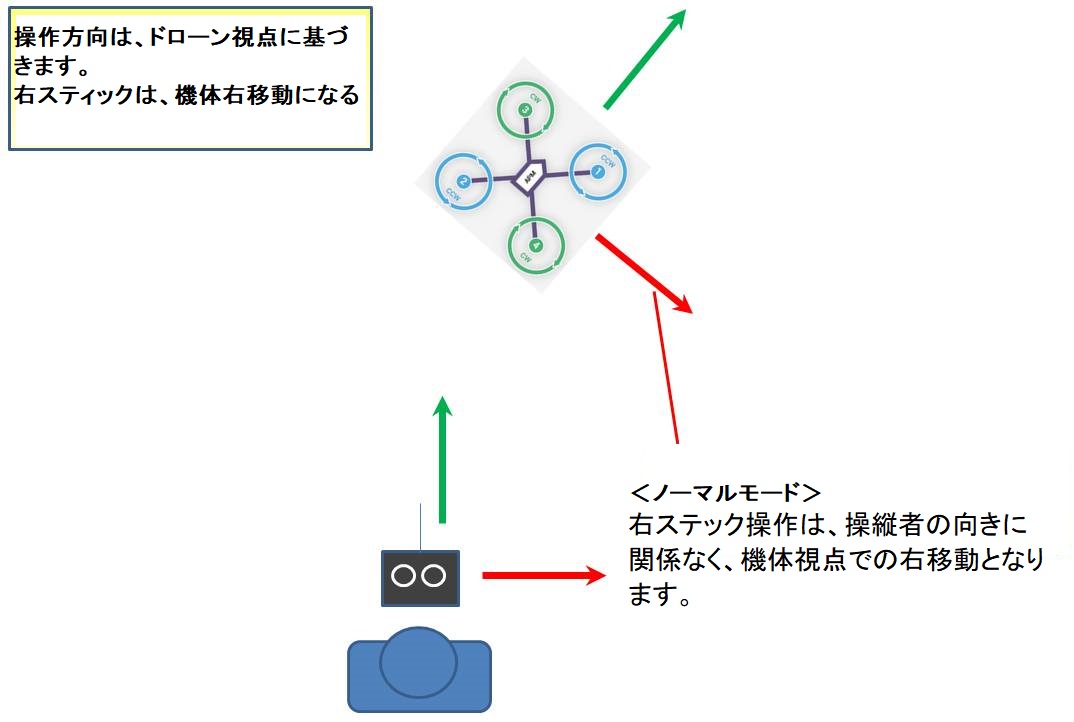
●シンプルモード:コンパス機能を使います
●スーパーシンプルモード:GPS補足が必要です。
バッテリモニターの指定
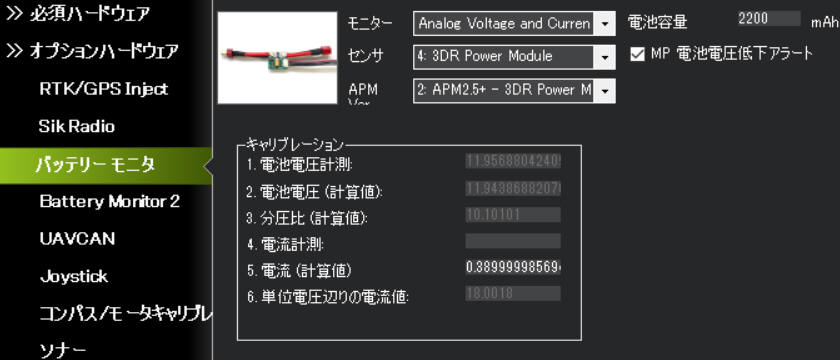
使用したバッテリモニタ

センサ:3DR Power Module, APMVor:APM2.5+- 3DR PowerModule
バッテリを接続し、テスター等で測定した電圧と同等である事を確認します。
この製品は、半田不良があるみたいなので、ケーブルを引っぱて、外れない事を確認します。
□フルパラメータ抜粋
AHRS_ORIENTATION 0 FCの取り付け方向を指定。向きが機体と一致している場合は、0。
RC_SPEED 100 Hz ESCが更新を受け取る周期です
RC#_DZ 30 PWM デッドゾーン 0 200
RC#_TRIM 1520 PWM ニュートラル値 800-2200
RC#_MAX 1900 PWM 送信機最大値 800-2200
RC#_MIN 1100 PWM 送信機最小値 800-2200
RC#_REV 1 リバース設定
LAND_SPEED 50 cm/s 着陸降下速度
RCMAP_PITCH 2 ch
RCMAP_ROLL 1 ch
RCMAP_THRPTTLE 3 ch
RCMAP_YAW 4 ch
トランスミッタがモード1かモード2かを確認します
1)ロールスティックはCH1を制御する必要があります
2)ピッチスティックはCH2を制御する必要があります
3)スロットルスティックはCH3を制御する必要があります
4)ヨースティックはCH4を制御する必要があります
5)3ポジションスイッチ(フライトモードを制御するため)は、CH5(コプターを使用する場合)またはCH8(カーまたは飛行機を使用する場合)を制御するように設定する必要があります。このチャネルは、FLTMODE_CHまたはMODE_CHパラメータを設定することによって移動できます
→フタバ 10J では、SWG に設定した。
6)ヘリコプターでは、チューニングノブはチャンネル6を制御する必要があります
RTL_ALT 1500 cm 高度を超えるとリターンします
RLT_ALT_FINAL 0 cm
RLT_LOIT_TIME 5000 mS 着陸開始まで上空で待機する時間