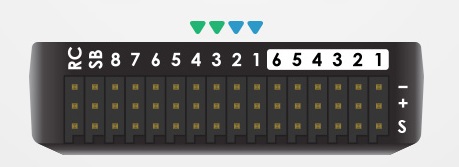
Pixhawk出力ピン(番号付き)。最初の4つのピンは、Quadframeを接続するために色分けされています
この記事では、ESC、モーター、プロペラをオートパイロットに接続する方法について説明します。例としてピクスホークが使用されていますが、他のオートパイロットも同様の方法で接続されています。
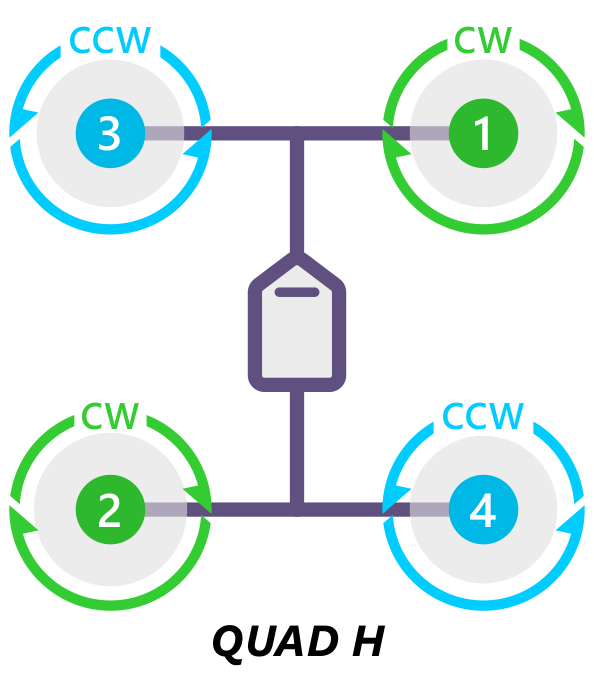
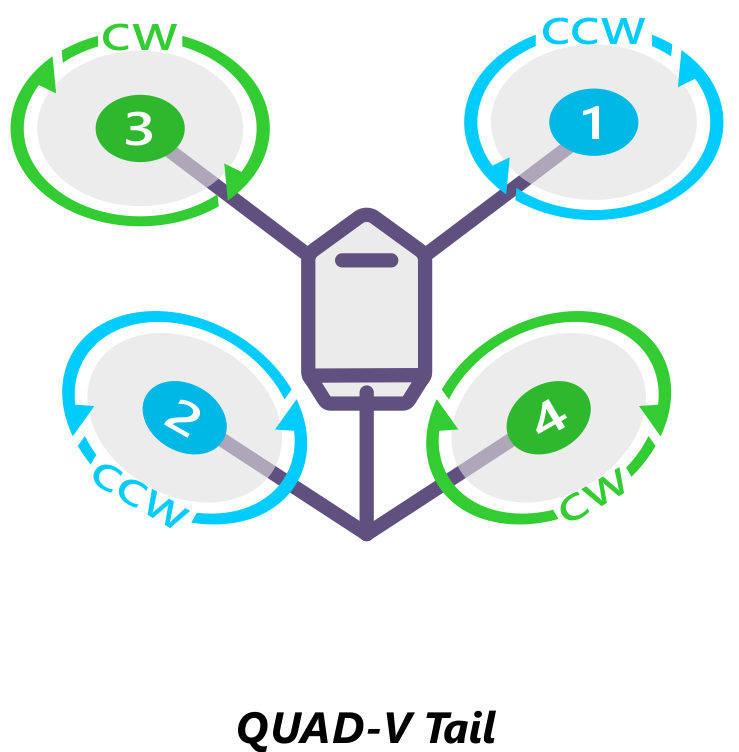
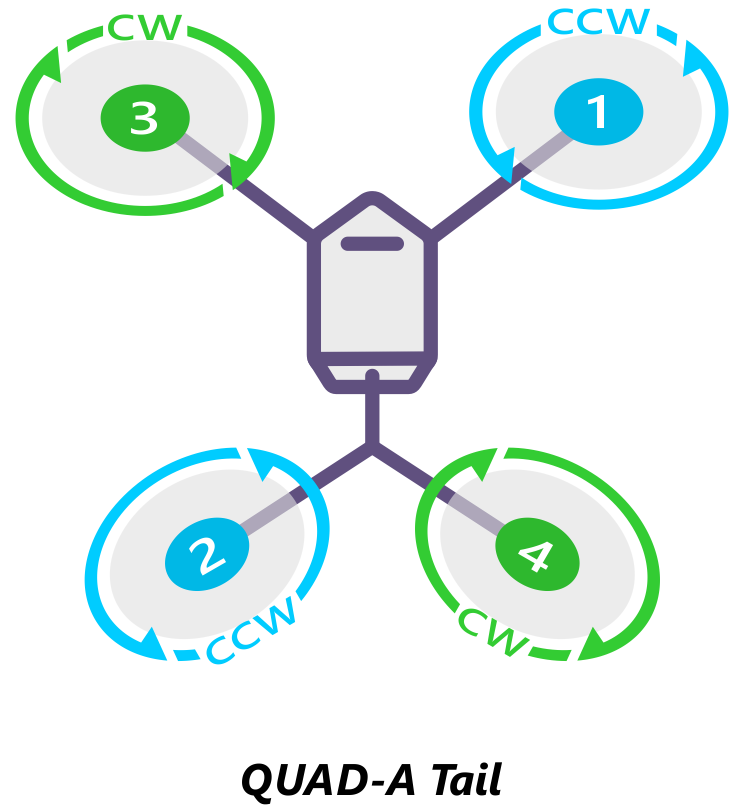
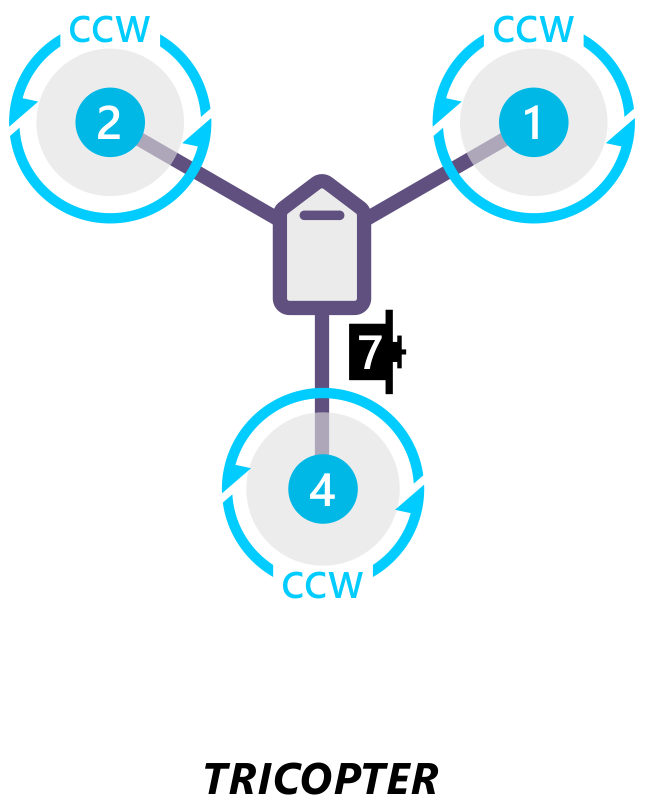
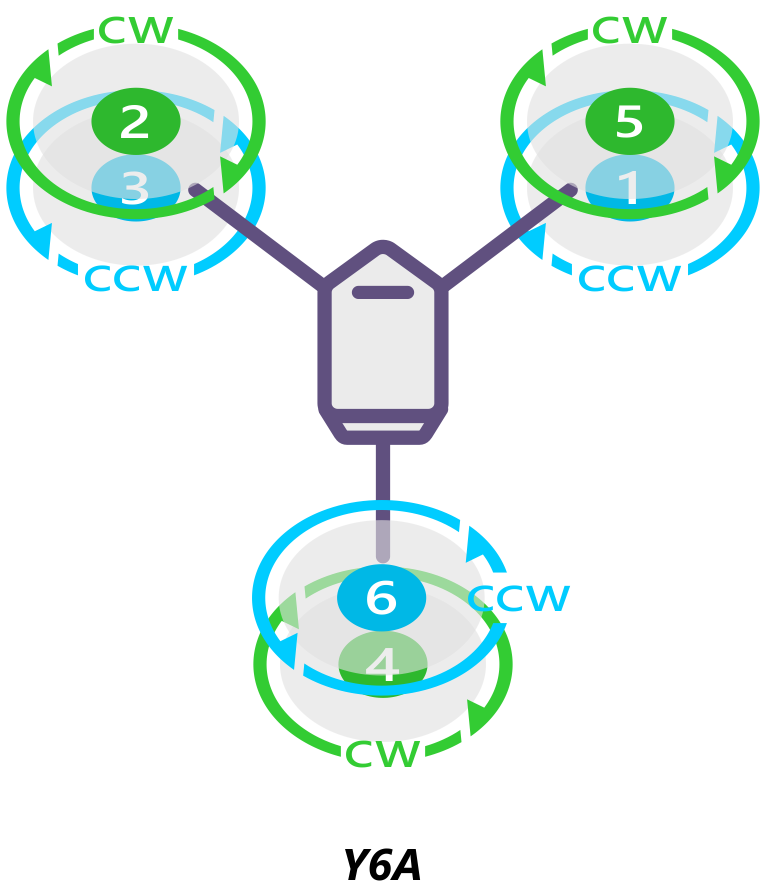
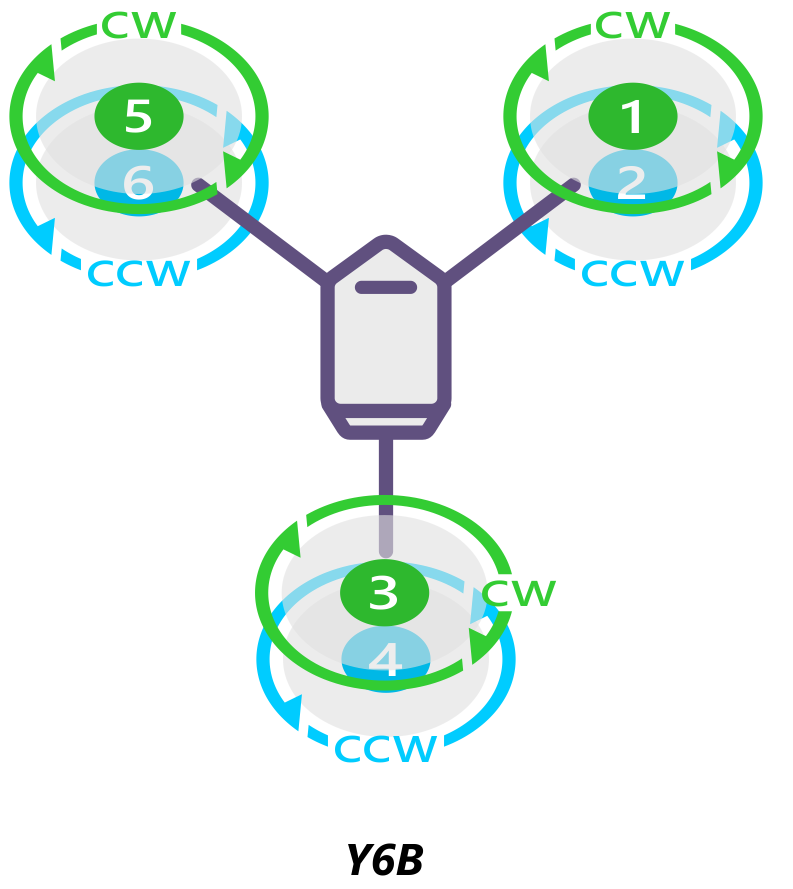
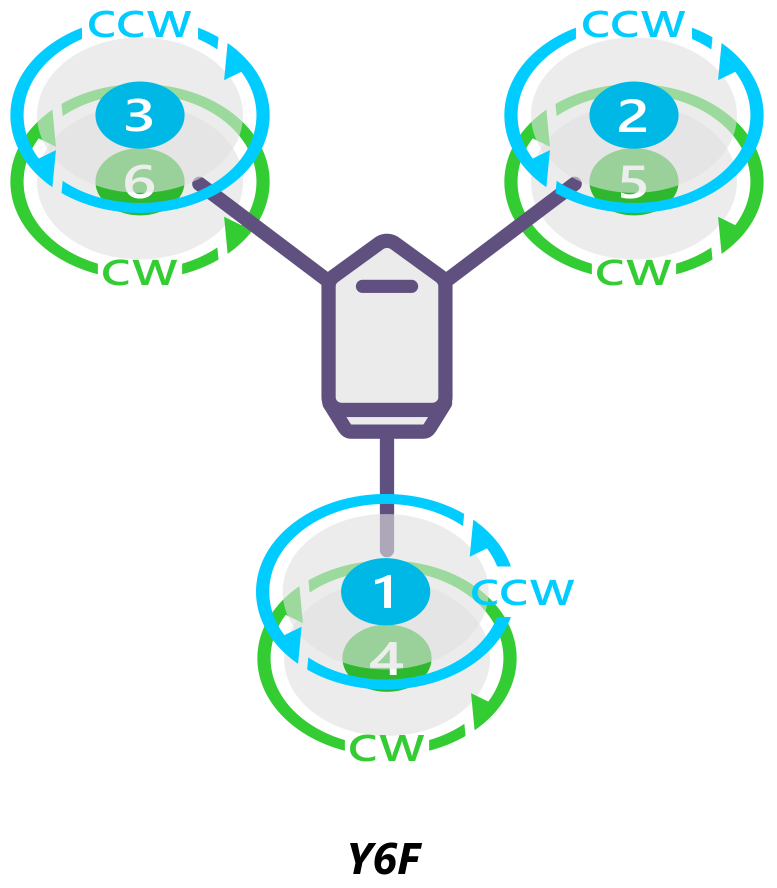
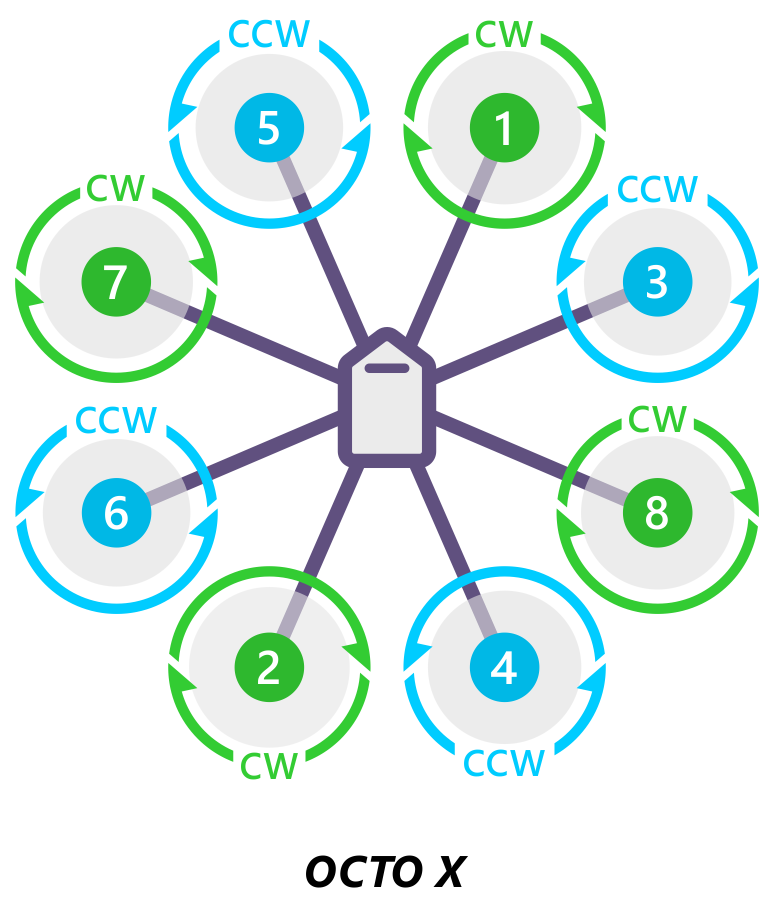
各ESCの電源(+)、アース(-)、および信号(s)ワイヤを、モーター番号でオートパイロットのメイン出力ピンに接続します。モーターの割り当て順序を決定するには、以下のフレームタイプを見つけてください。
Pixhawk出力ピン(番号付き)。最初の4つのピンは、Quadframeを接続するために色分けされています
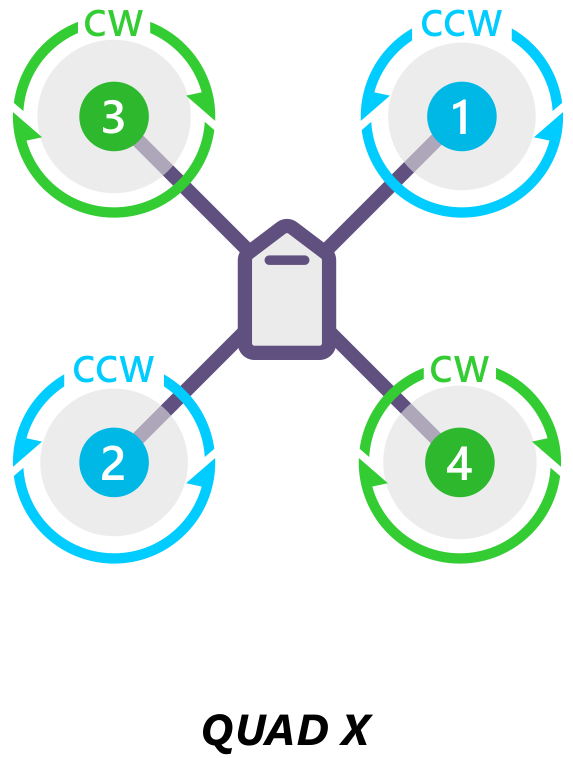
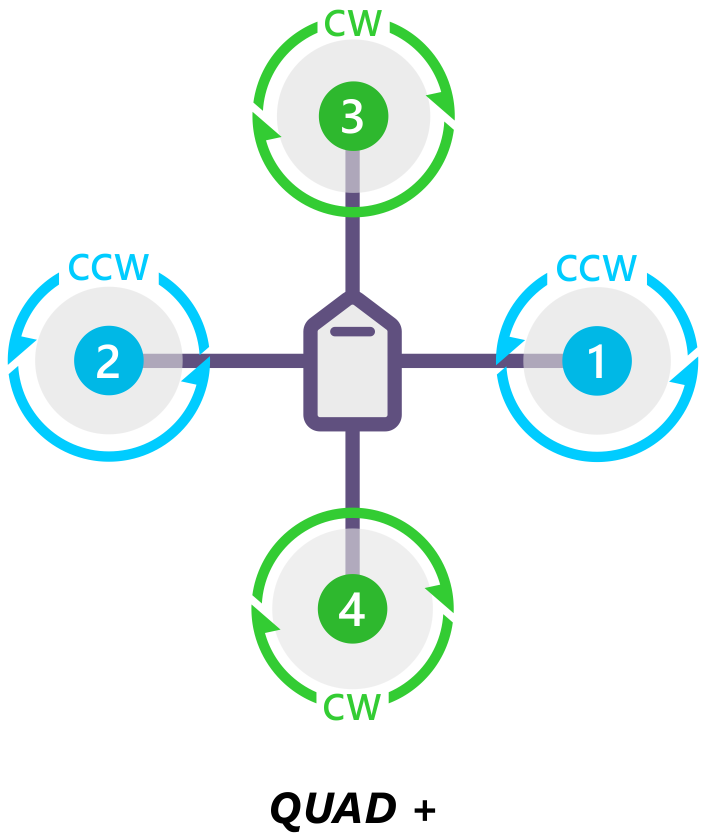
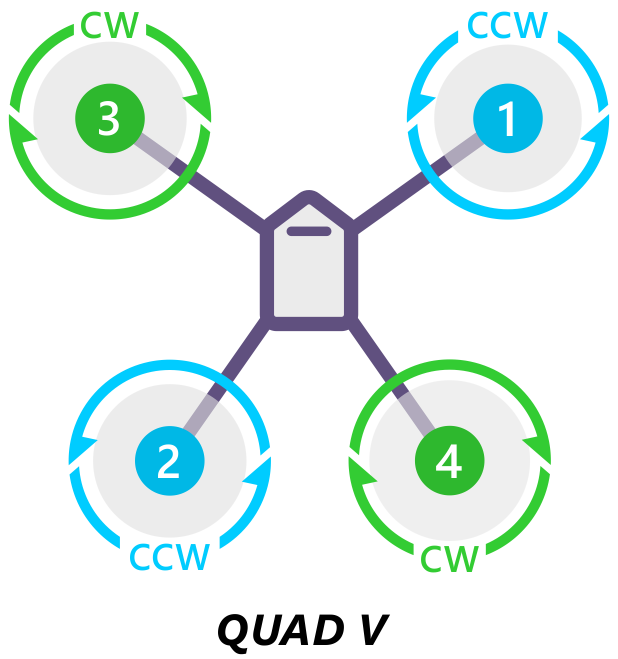
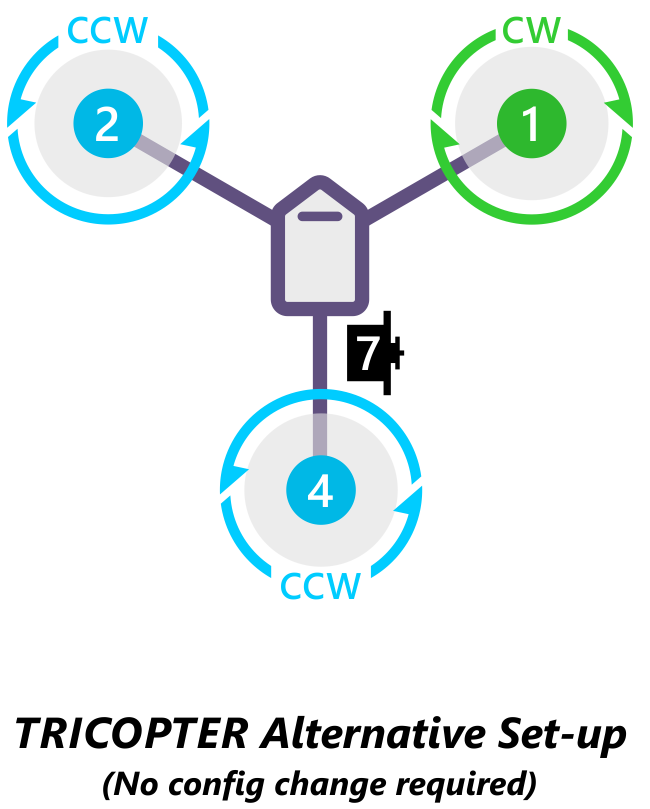
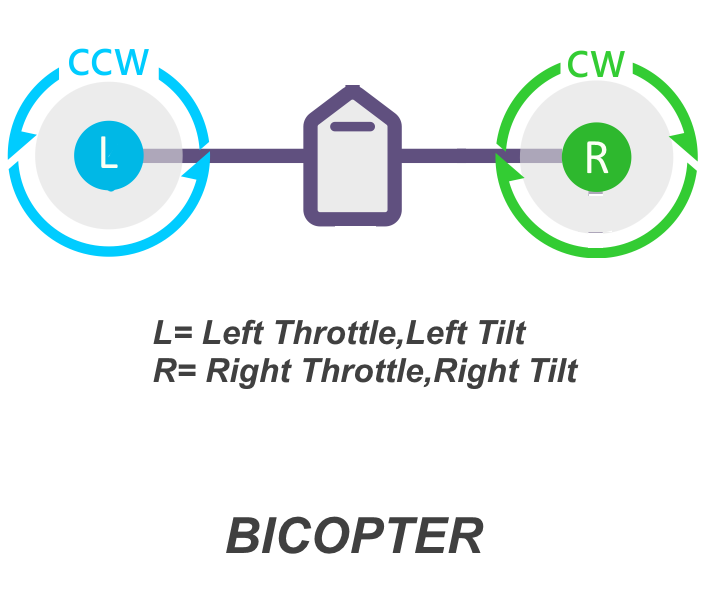
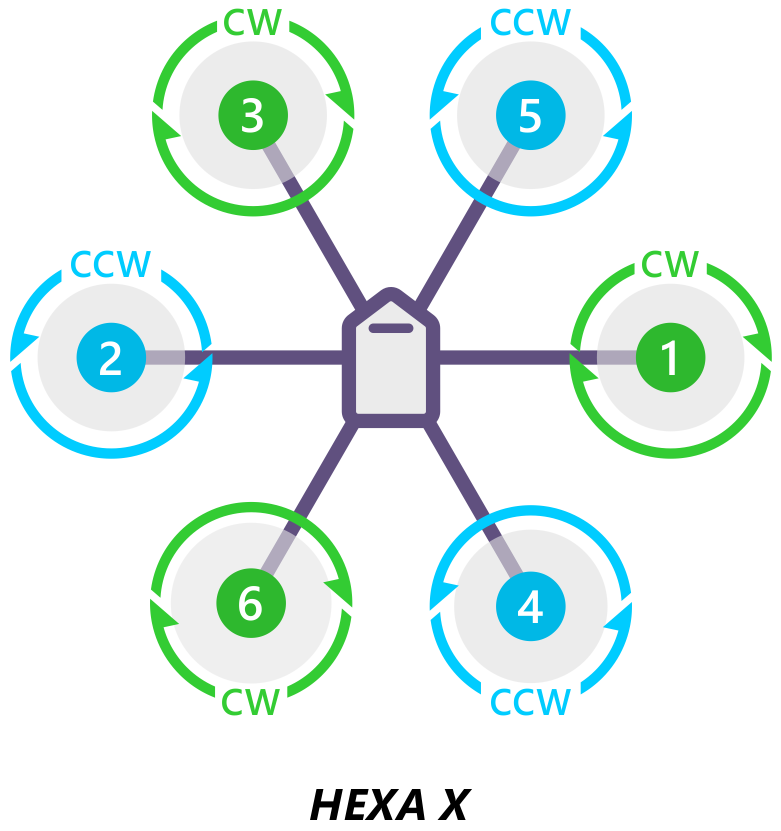
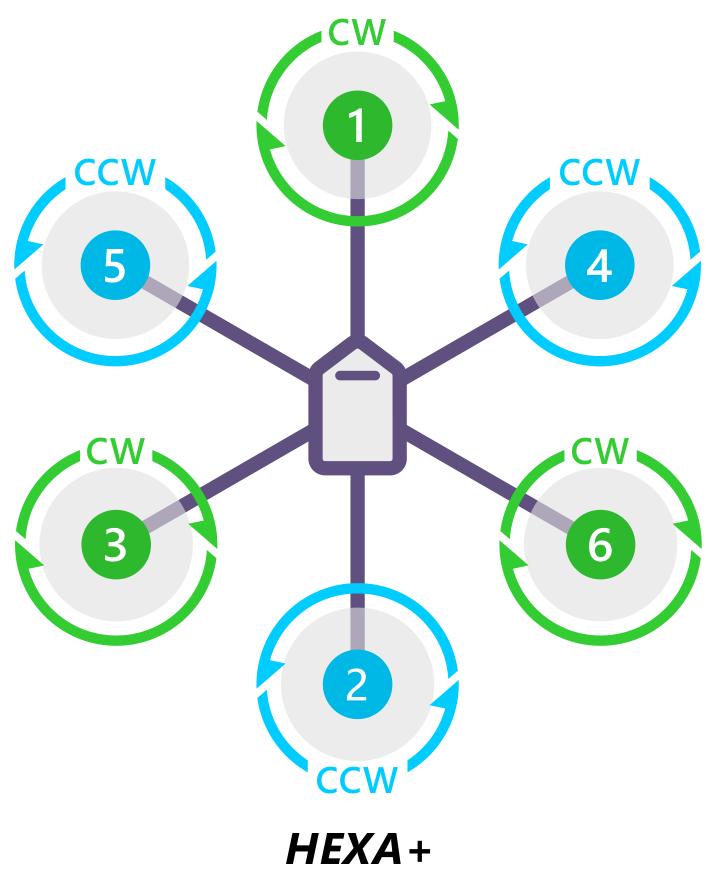
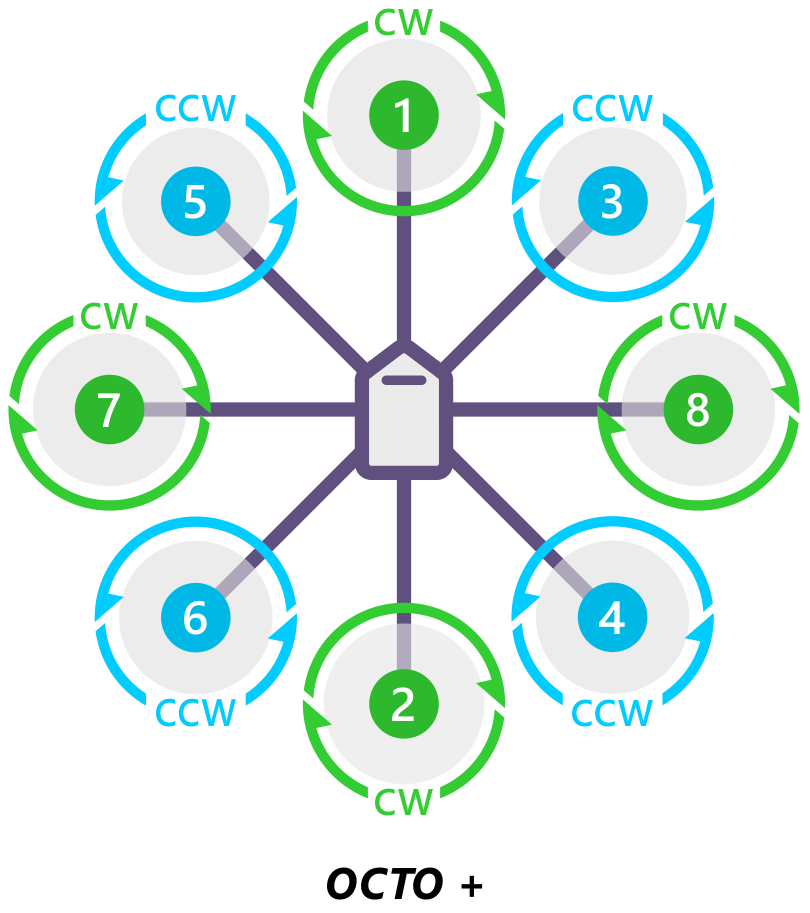
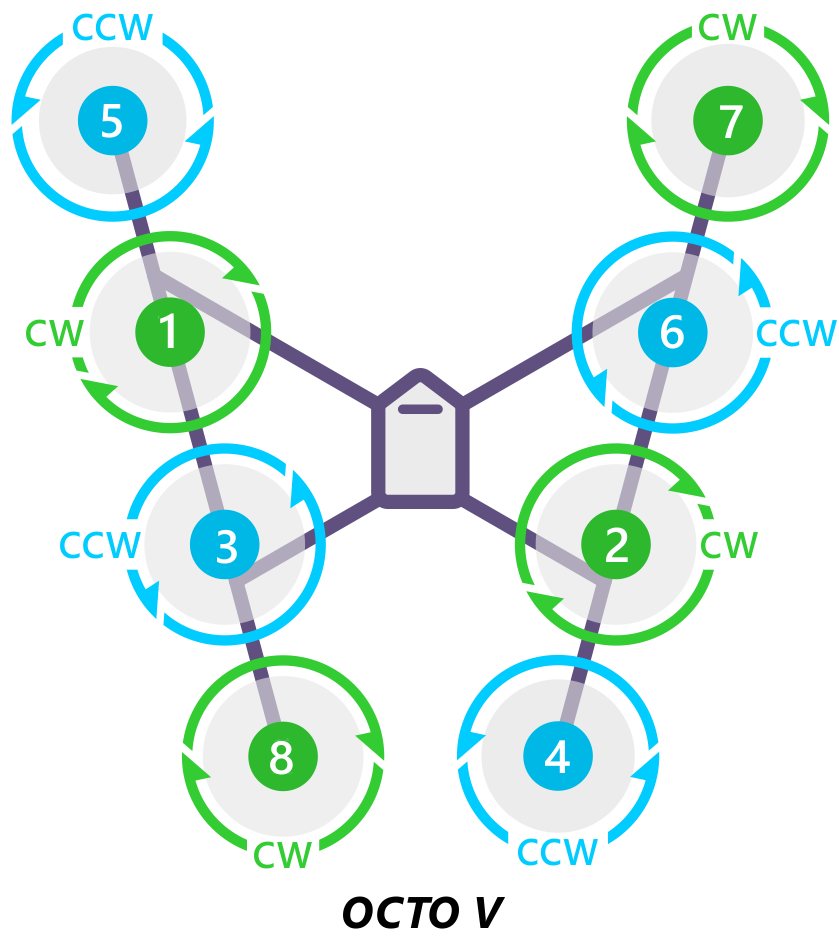
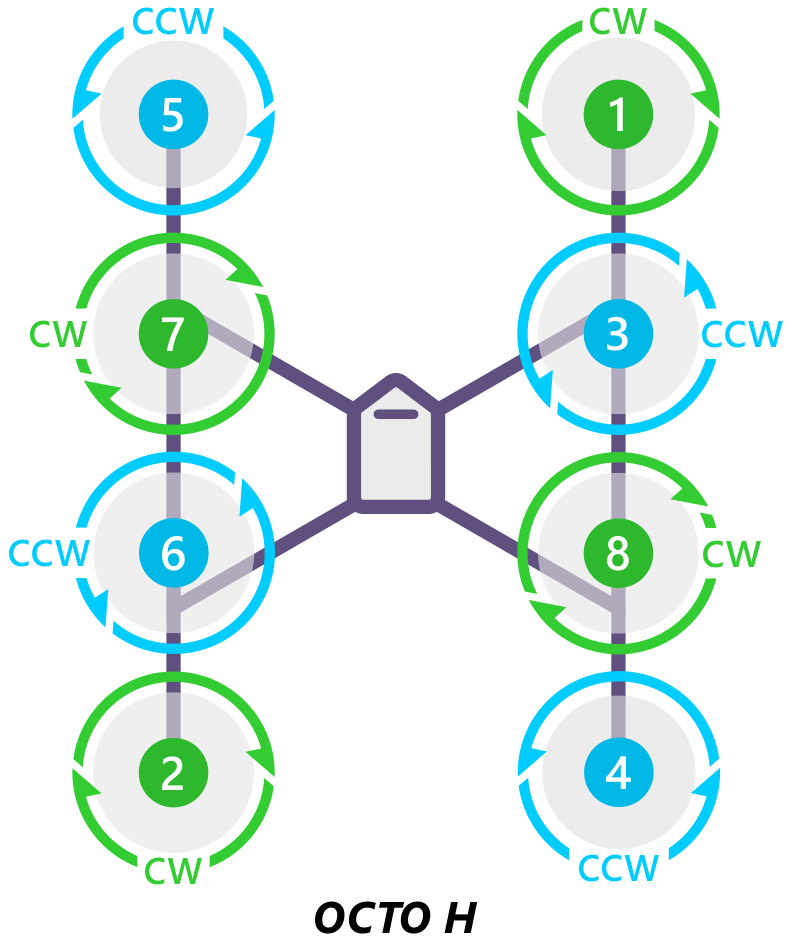
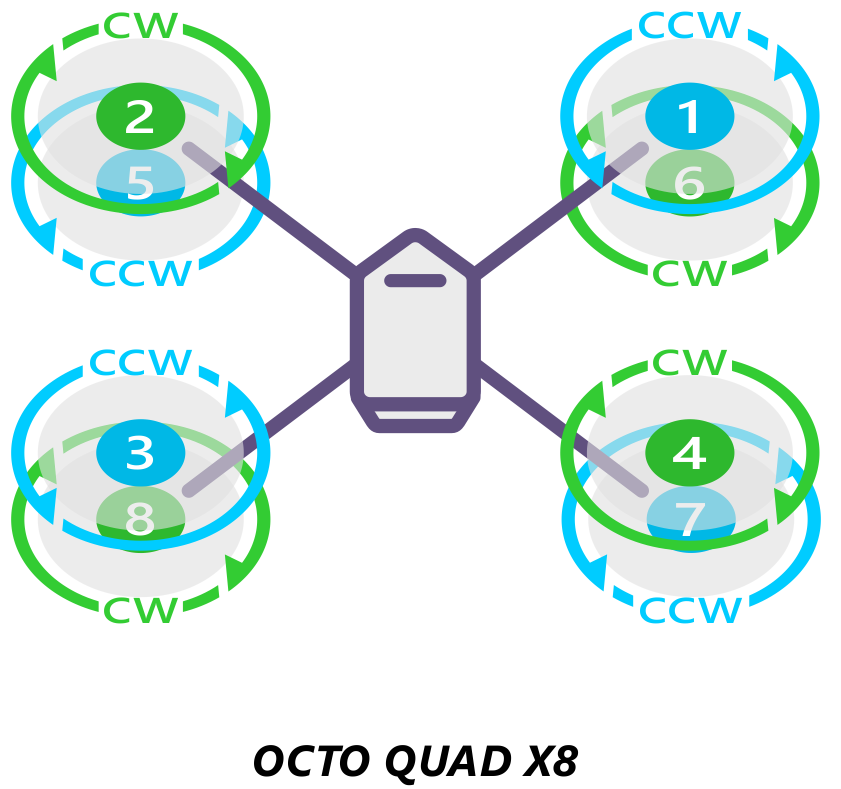
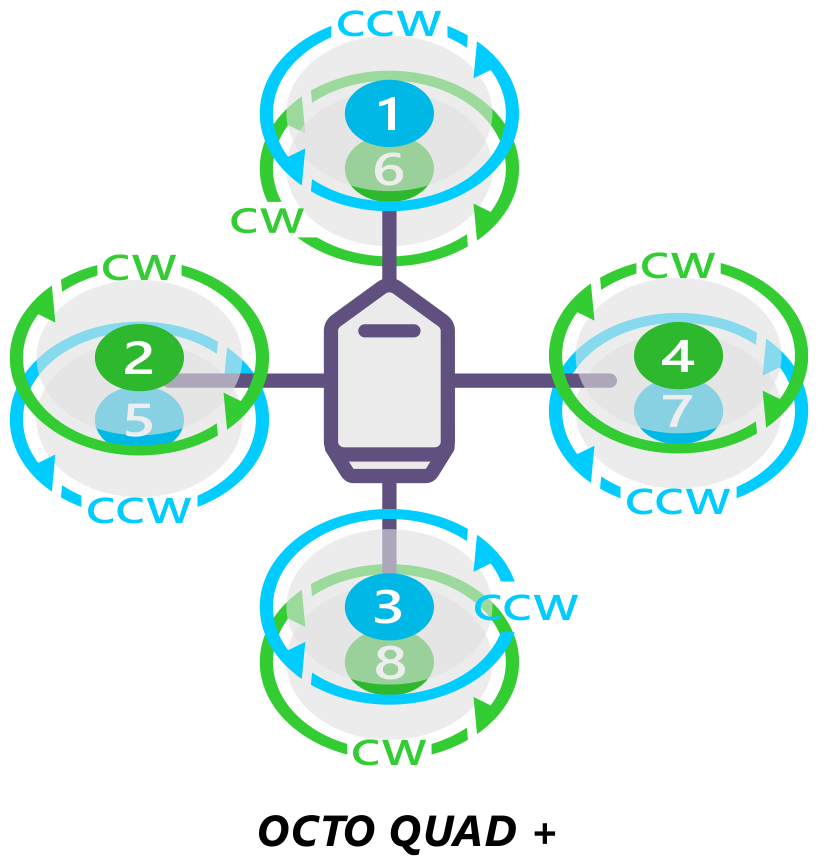
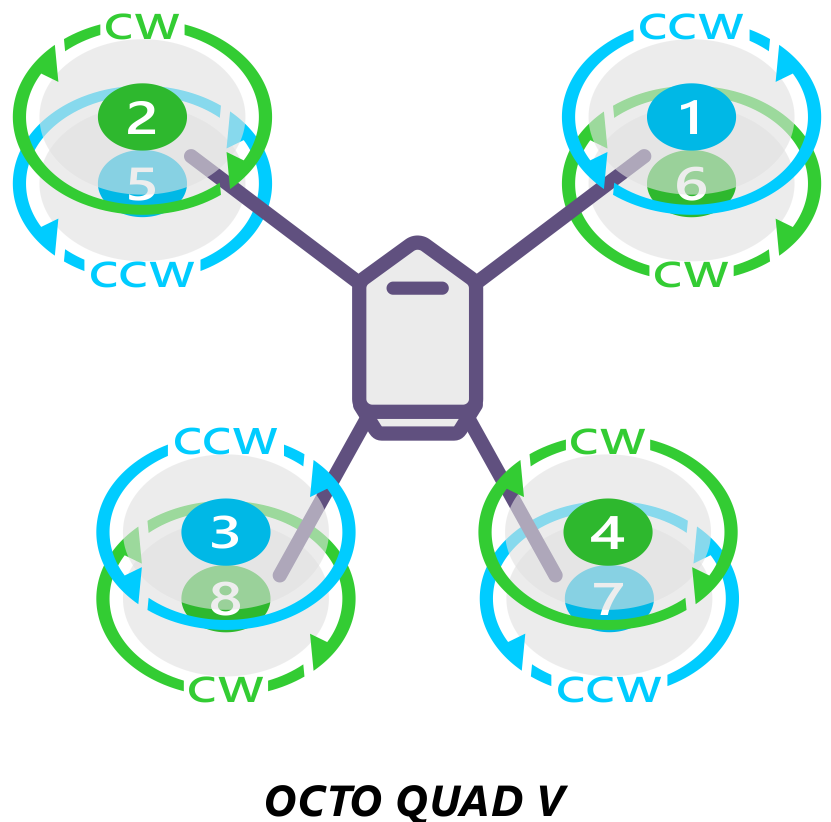
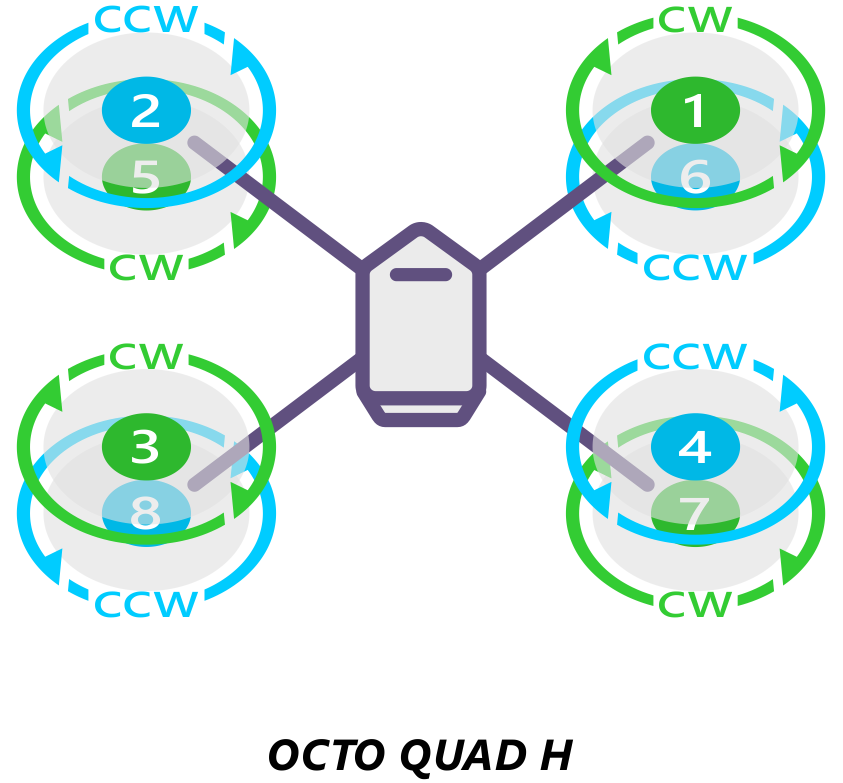
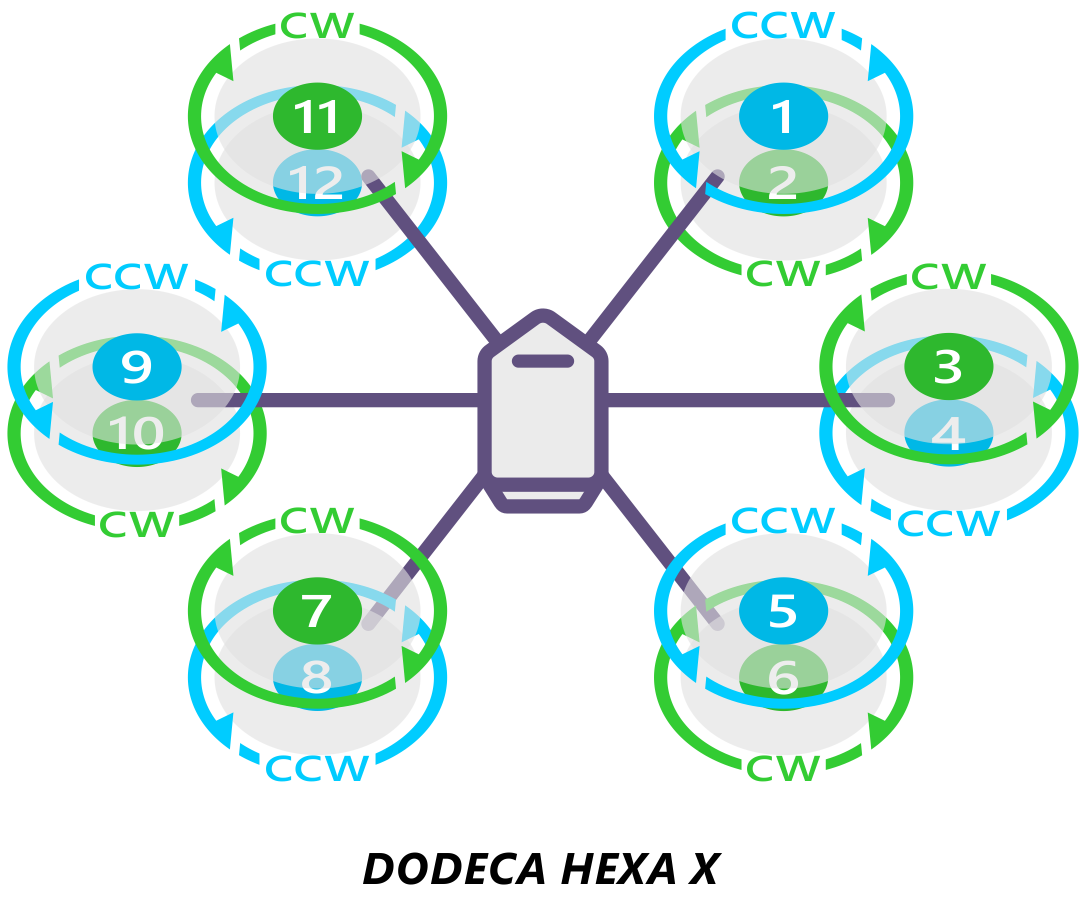
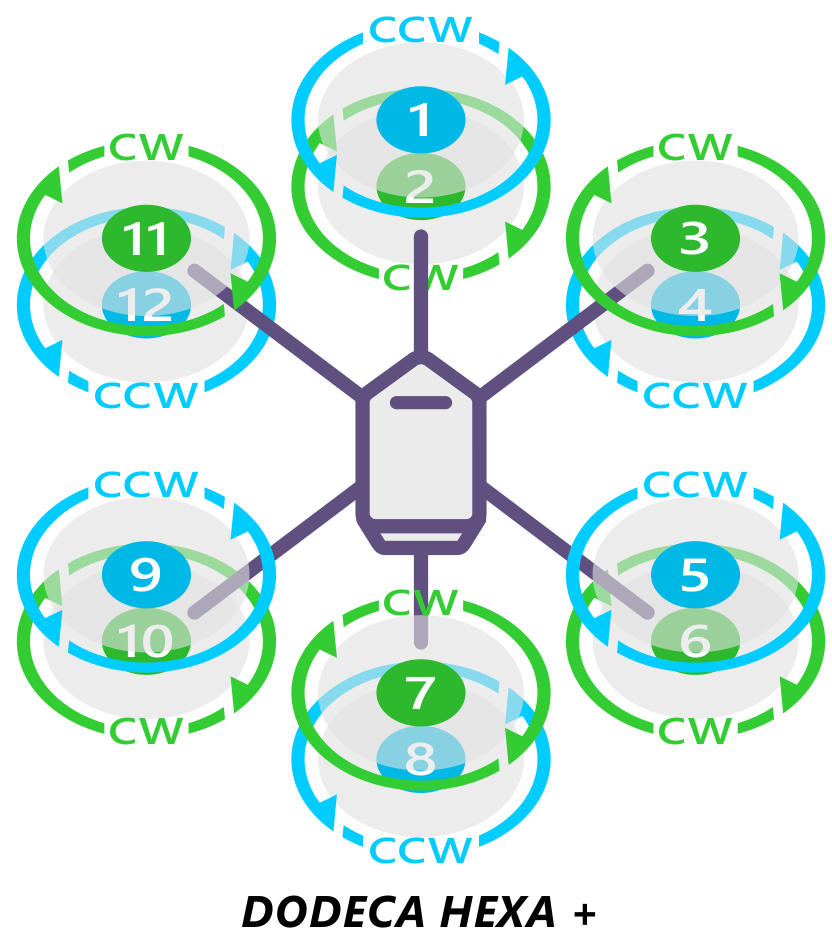
以下の図は、各フレームタイプのモーターの順序を示しています。番号は、自動操縦シューからのどの出力ピンを各モーター/プロペラに接続する必要があるかを示します。プロペラの方向は緑(時計回り、CW)または青(反時計回り、CCW)で表示されます。

モーター次数図の凡例
注意
テールサーボの方向がヨーに応答して間違った方向に進んでいる場合は、RCn_REVERSERC入力方向またはチルトサーボのSERVOn_REVERSEパラメーターを1(0から)に設定する必要があります。詳細については、TriCopter設定ページを参照してください。)
上の図は、時計回り(プッシャーと呼ばれる)と反時計回り(プーラーと呼ばれる)の2種類のプロペラを示しています。以下に示すように、その形状によって正しいプロペラタイプを認識するのに最も信頼性があります。太いエッジは、回転方向に移動するリーディングエッジです。トレーリングエッジは、より根本的なスカラップで、通常は薄くなっています。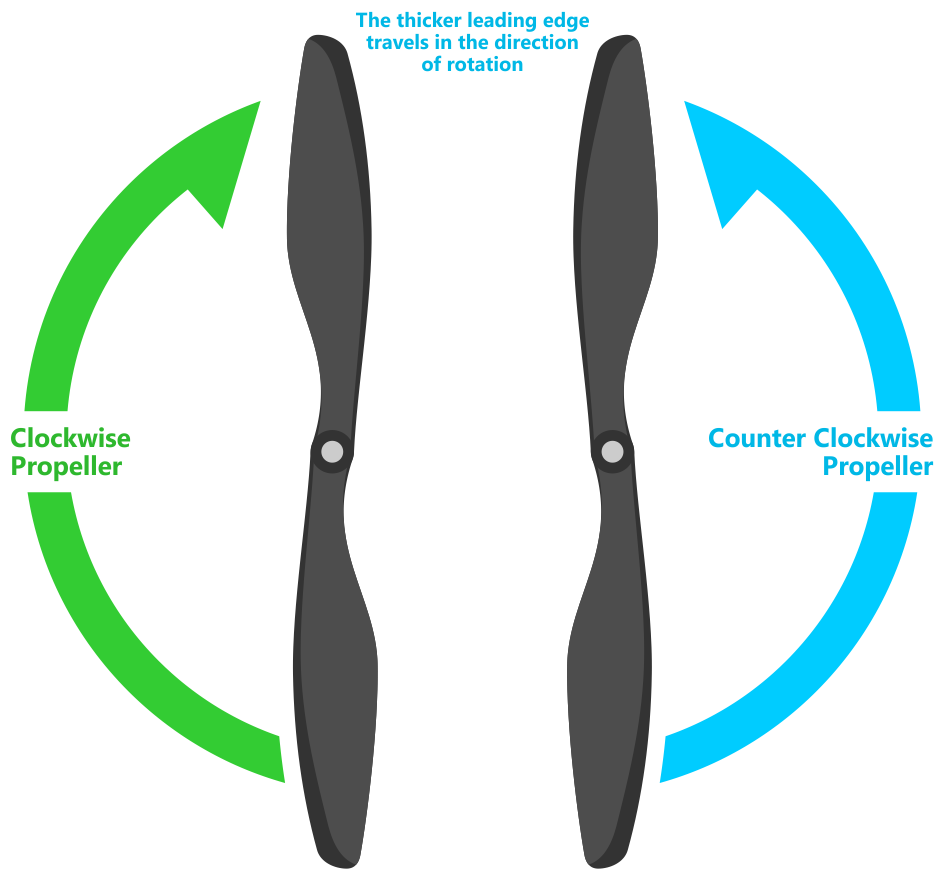
ラジオ とESCの調整が完了したら、モーターが修正方向に回転していることを確認できます。
ヘリコプターにプロペラがないことを確認してください!
送信機をオンにして、フライトモードスイッチが[安定化]に設定されていることを確認します。
バッテリーを接続します。
ヘリコプターを武装するには、スロットルを5秒間押し続けます。
スロットルを右に下げたままアームに失敗し、モーターが回転しない場合は、おそらくプリアーム安全チェックに失敗しています。
正常にアームできたら、少量のスロットルを適用し、各モーターの回転方向を観察してメモします。選択したフレームについて、上記の画像に示されている方向と一致する必要があります。
モーターの回転を間違った方向に逆にします。
ヒント
3つのESCからモーター電源リード。
モーターが正しく接続されていることを確認する別の方法は、Mission Planner Initial Setupメニューの「モータテスト」を使用することです。
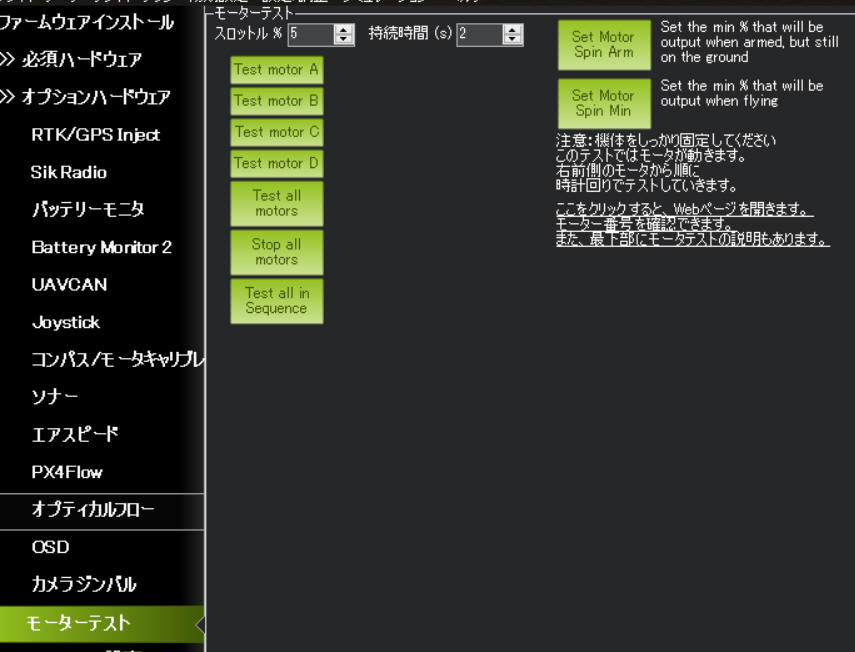 ミッションプランナー:モーターテスト
ミッションプランナー:モーターテスト
MAVLinkを介して機体に接続されている場合、上記の緑色のボタンをクリックすると、対応するモーターが5秒間回転します。以下の例に示すように、文字はモーター番号に対応しています。
回転する最初のモーターは、+構成の場合は直接前方にあるモーター、またはX構成の場合は直進の右側にあるモーターです。その後、モーターテストは時計回りに回転します。
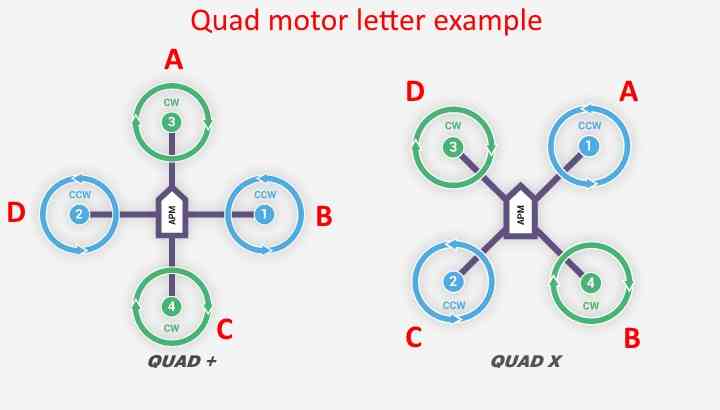
X8の場合、最初に右上のモーターを回転させてから、次に右下のモーターを回転させ、同じパターンで動きます。
OctoVは最初に右前のモーターを回転させ、次に再び左前のモーターに到達するまで時計回りに進みます。
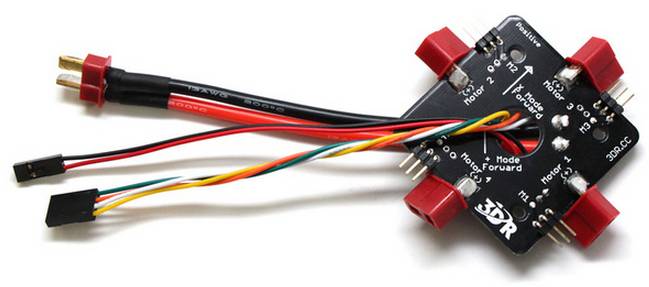
モーター出力の接続には2つの方法があります。電子スピードコントローラー(ESC)を直接オートパイロットに接続するか、配電盤(PDB)を使用します。
PDBを使用する場合は、各ESCの電源(+)、アース(-)、および信号(s)ワイヤーをモーター番号に従ってPDBに接続します。モーターの割り当て順序を決定するには、以下のフレームタイプを見つけてください。次に、PDBからの信号線をオートパイロットのメイン出力信号ピンに接続します(モーターの注文番号がコントローラーのメイン出力ピン番号と一致していることを確認します)。電源モジュールを使用している場合、PDBからオートパイロットボードに電源線と接地線を接続するかどうかはオプションです。これらのケーブルをパワーモジュールに加えて、またはパワーモジュールの代わりに、または低電流サーボの共通ポイントとして使用する場合は、アース(-)ワイヤーをメイン出力アース(-)ピンとパワー(+)ワイヤーに接続します。メイン出力電源(+)ピンに接続します。