デッドゾーンの測定
-
車両からプロペラを取り外します
-
LiPoバッテリーを接続する
-
USBケーブルまたはテレメトリーを使用してオートパイロットをミッションプランナーに接続する
-
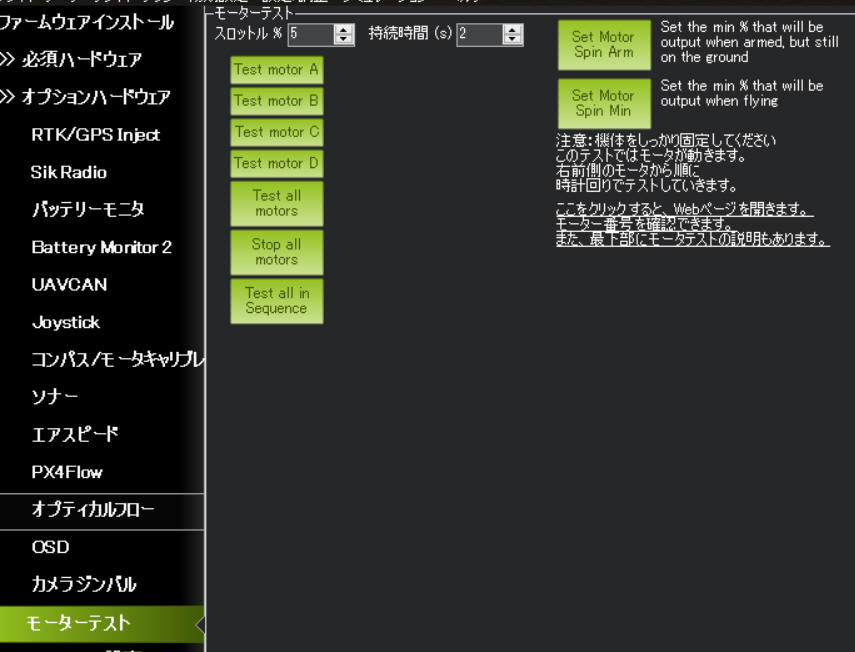
ミッションプランナーの初期設定>>オプションのハードウェア>>モーターテストページを開きます
-
「スロットル%」フィールドを大きくし、各「モーターのテスト」ボタンを押して、各モーターが回転するために必要なパーセンテージを決定します。すべてのESCが同じメーカーのものである場合、それらはすべて同様の不感帯を持っている可能性がありますが、1つまたは2つが1%〜2%異なることが一般的です。すべてのモーターの中で最も高いパーセンテージを選択します-以下で使用します。