従来のヘリコプター–斜板の設定
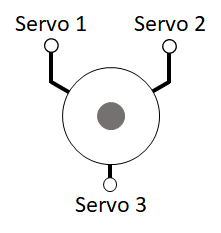
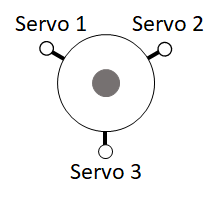
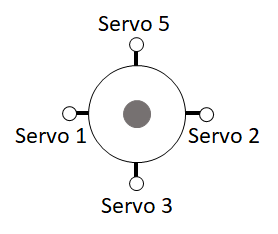
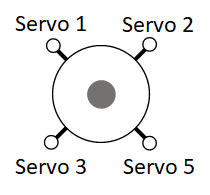
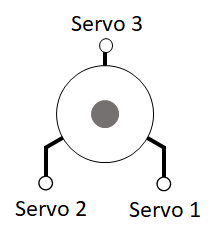
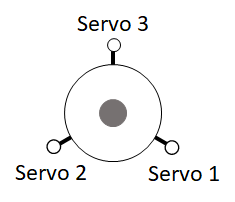
斜板は、パイロットのピッチ、ロール、コレクティブコマンドに基づくサーボ入力を受け取り、それらを個々のブレードピッチ入力に変換するように設計されています。3つおよび4つのサーボ斜板には、さまざまなサーボ配置があります。斜板ライブラリは、3つおよび4つのサーボ斜板の一般的な構成をすべてカバーしています。独自のスワッシュプレートをお持ちの場合は、一般的な3つのサーボスワッシュプレートを使用することもできます。リニアライズサーボは、3つと4つのサーボスワッシュプレートの両方に使用できる機能ですが、バインドする可能性がないため、3つのサーボスワッシュプレートではオプションです。4点アタッチメントでのバインドの可能性があるため、4つのサーボスワッシュプレートで常に必要になる可能性が最も高くなります。
あなたが始める前に
斜板のセットアップを開始する前に、ヘリコプターコントロールリンケージが組み立て手順に従ってセットアップされていることを確認してください。正確なブレードピッチ測定を行うには、下の図に示すように、着陸装置の下にあるシムを使用して、ローターシャフトを地面に対して垂直にします。
最後に、ガスエンジンの場合、テールローターリンケージまたはスロットルリンケージを調整していないと、斜板のセットアップ中に拘束が発生する可能性があります。これは、H_SV_MAN機能が、サーボを最小値と最大値に駆動する手動サーボ設定を提供するためです。これには、スロットルカーブ設定によるテールローターサーボとスロットルサーボが含まれます。
適切なスワッシュプレートの動きを確認する
送信機を使用して、周期的入力および集合的入力に対する適切な斜板応答を確認します。エレベータースティックを前方に押すと、斜板が前方に傾きます。エレベータースティックを後ろに引くと、斜板が後方に傾きます。エルロンスティックを右に押すと、斜板が右に傾きます。エルロンスティックを左に押すと、斜板が左に傾きます。スロットルスティック(集合)を押し上げると、斜板が上がります。スロットルスティック(集合)を引き下げると、斜板が下がります。設定しSERVO1_REVERSED、SERVO2_REVERSED、SERVO3_REVERSED、およびH_SW_COL_DIRのパラメータので、あなたの集団および環状入力に(上述したように)正しく斜板応答します。
スワッシュプレートを水平にする
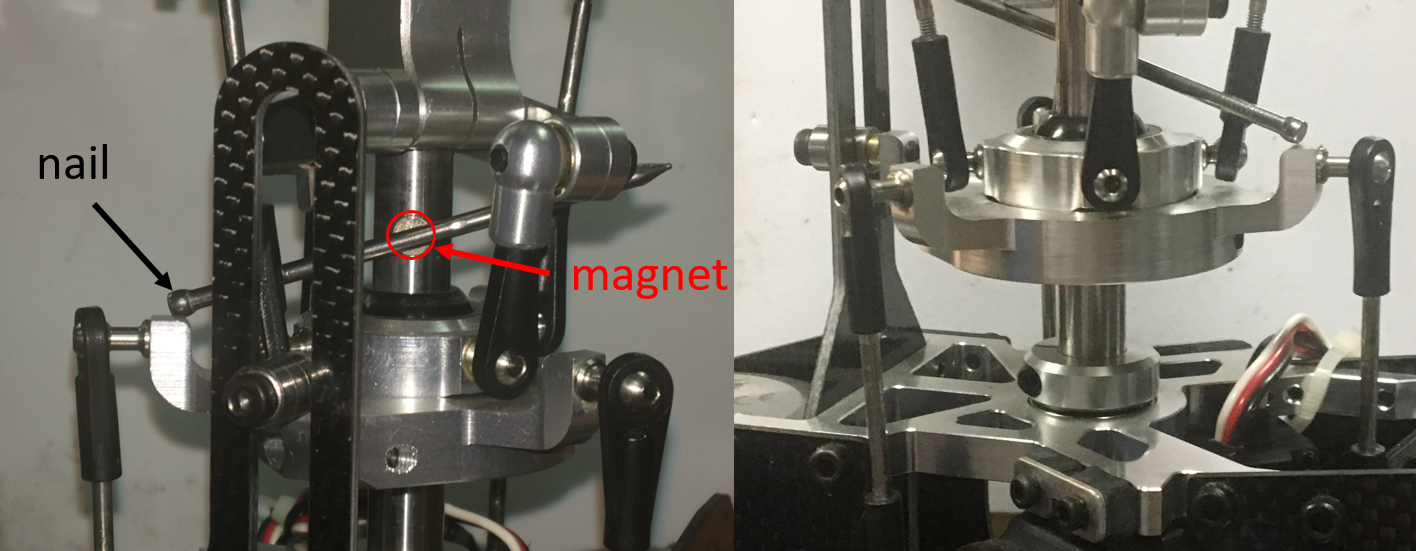
斜板は、斜板をシャフトに対して垂直に保つように特別に設計されたツールを使用して、またはより安価な方法で、磁石と釘を使用して水平にすることができます(以下を参照)。磁石と釘を使用すると、斜板を水平にするためにローターヘッドを取り外す必要はありません。シャフトを回転させ、釘が斜板アームの上を通過するようにします。爪が各斜板アームの上部に触れるように、以下のいずれかの方法を使用して斜板を調整します。
リニアサーボを使用せずに斜板を水平にする
サーボの線形化機能を使用していない場合は、サーボトリムパラメーターを使用して斜板を水平にします。設定H_SV_MANのサーボが軸にほぼ垂直になるまで1.スティック(集団)スロットル送信機を調整するパラメータ。斜板が水平になるまでSERVO1_TRIM、 SERVO2_TRIM、およびSERVO3_TRIMを調整します。
リニアサーボを使用した斜板のレベリング
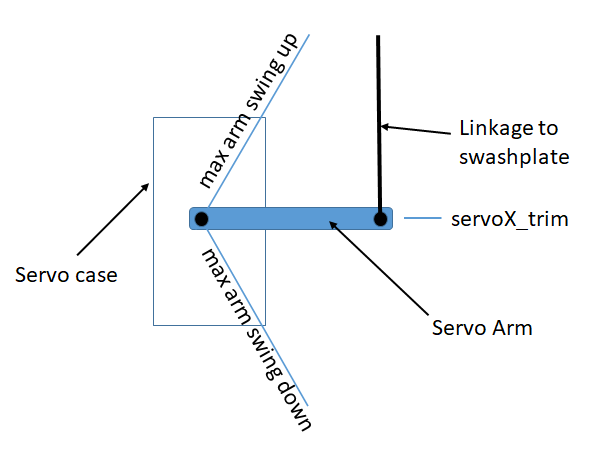
サーボの線形化機能を使用する場合は、斜板をサーボに接続するピッチリンクを使用して斜板を水平にする必要があります。ただし、最初に、サーボの移動の中間点で、アームがピッチリンクに垂直になるようにサーボを設定します。ピッチリンクは、ほとんどの場合、シャフトにも垂直になります。サーボコントロールホーンのスプラインでは、サーボアームをシャフトに垂直にすることができない場合は、サーボトリムパラメーターを使用して、それらをシャフトに垂直にすることができます。あなたが得ることができる限り1500に近いトリムが欲しい。これで、ピッチリンクを調整して、スワッシュプレートを水平にすることができます。
集合ピッチ範囲とゼロスラストポイントの設定
サーボ手動設定(H_SV_MAN)を使用して、スワッシュプレートを最小、中間、最大位置の間で移動します。各位置で、ブレードピッチゲージを使用して、目的のブレードピッチを設定します。一般的なブレードピッチの範囲は、-2〜+10度です。
H_SV_MANを2に設定すると、斜板が最大位置に移動します。ブレードピッチ角度が希望する最大集合ブレードピッチを測定するまで、H_COL_MAXを調整します。
H_SV_MANを4に設定すると、斜板が最小位置に移動します。ブレードピッチ角度が望ましい最小ブレードピッチの集合になるまでH_COL_MINを調整します。
H_COL_MIDのパラメータは、混合ヨーする集団のために使用されます。垂直軸で高度保持を使用するモードの集合ピッチ下限としても使用されます。これにより、オートパイロットが集団的に運転して地面の共振が発生するのを防ぎます。H_COL_MIDのパラメータは、0度コレクティブブレードピッチに設定されているか、あなたは非対称ブレードを持っている場合、ゼロ推力を作り出すブレードピッチに設定します。Copter
3.6以降では、オートパイロットがコマンドできる最小集団ピッチはパラメーターで行われていましたH_COL_LAND_MIN。
H_SV_MANを3に設定して、斜板を中間位置に移動させます。ブレードピッチ角度がゼロスラストに対応する望ましいブレードピッチ全体を測定するまで、H_COL_MIDを調整します。
最大周期ピッチの設定
パラメータH_CYC_MAXは、最大サイクリックブレードピッチを設定します。最大周期的ブレードピッチを確認するには、測定対象の軸に対してブレードを90度配置する必要があります。したがって、縦方向の最大ブレード周期ピッチを測定している場合は、ブレードを航空機の機体に対して垂直になるまで回転させます(左側と右側を突き出します)。エレベーターと補助翼スティックを中心にしてブレードピッチを測定し、次にエレベータースティックを前方または後方に完全に偏向させてブレードピッチを測定します。2つの測定値の違いは、H_CYC_MAXに対応する最大周期ブレードピッチです。周期的なブレードピッチは、ピッチ(エレベーター)軸とロール(エイロン)軸で同じです。
戻る 次へ