従来のヘリコプター–チューニング
このチューニングガイドは、従来のヘリコプター用のArduCopterのすべてのバージョンに適用できます。ただし、Copter 3.4以降用に作成されています。パラメータの名前とスケーリングがCopter 3.3から3.4に変更されたため、 古いチューニングガイドがここにアーカイブされます
従来のヘリコプターの設定を変更する場合、地上局ソフトウェアの完全または完全なパラメーターリストのみを使用するようにユーザーに通知します。 マルチローター航空機用に設計された基本、拡張、または詳細チューニングページを使用しないでください。これらのページは、従来のヘリコプターに望ましくない設定変更を加えます。また、変更を行った後、フライトコントローラに変更を書き込むことを忘れないでください。変更しないと、保存されません。
一般的なArduCopter飛行制御法の説明
ユーザーは一般的に、調整する前に飛行制御法を理解する必要があります。大まかに言うと、誘導制御法は、ソフトウェアがパイロット入力を命令された姿勢(安定化モード)または命令された速度(アクロモード)に変換し、航空機を制御してその命令された値を達成するアーキテクチャに従うモデルとして設計されています。バックグラウンドで、ソフトウェアは、パイロットまたはオートパイロットの入力に基づいて、航空機が空間内のどこにあるか(つまり、ピッチアンドロール姿勢)を追跡または予測します。2つのコントローラー(姿勢と速度)があり、実際の航空機がソフトウェアの予測されるピッチとロールの速度と姿勢を確実に追跡するように連携します。
パイロットのコマンドは、ピッチの場合はATC_ACCEL_P_MAX、ロールの場合はATC_ACCEL_R_MAXを介してコマンドできる加速度の量によって制限されます。パイロット入力に対する航空機の初期応答性(サクサク/ 鈍さ)は、ATC_INPUT_TCパラメーター(AC 3.5以前では、このパラメーターはRC_FEELと呼ばれていました)を介して調整できます。パイロット入力とこれらのパラメーターを使用して、レートコントローラーに供給される目的の応答を実現するために必要な要求レートを決定します。
姿勢コントローラは、航空機の実際の姿勢がオートパイロットの予測される姿勢と一致することを保証するために使用されます。ピッチ内のATC_ANG_PIT_Pとロール内のATC_ANG_RLL_Pを使用して 、航空機を予測される姿勢に駆動するレートコントローラーに供給されるレートを決定します。
速度制御装置は、パイロット入力から得られた要求速度と姿勢制御装置からの速度の合計を受け取り、入力速度を達成するために必要な斜板コマンドを決定します。レートコントローラは、PID制御アルゴリズムとフィードフォワードパスを使用して航空機を制御し、入力レートを実現します。フィードフォワードパスは、入力レートを使用して適用ATC_RAT_PIT_VFFのピッチとのゲインATC_RAT_RLL_VFF斜板コマンドのその部分を決定するために、ロールのゲインを。PIDアルゴリズムは、実際の速度と入力速度の間の誤差を使用して、斜板コマンドのその部分を決定します。これらは合計され、サーボ位置が決定されるミキシングユニットに送信されます。
したがって、この調整方法では、最初にFFゲインを使用して、要求されたレートが実際のレートと一致することを確認します。ただし、ご迷惑をお掛けしますので、ご希望の料金とは異なる場合がございます。PゲインとDゲインは、実際のレートが要求されたレートから逸脱する原因となる妨害から保護するために使用されます。したがって、PおよびDゲインは、実際のレートを要求されたレートと正確に一致させることができない場合があります。ソフトウェアは航空機の向きを追跡するため、要求された速度と実際の速度との間に誤差があると、姿勢エラーが発生します。したがって、姿勢の誤差を効果的に計算するレート誤差を継続的に合計する、インテグレーターと呼ばれる機能があります。Iゲインは、積分器で乗算され、レートコントローラの他の出力と合計されます。積分器は、ATC_RAT_RLL_IMAXがロール、 ATC_RAT_PIT_IMAXがピッチ。対地速度が5 m / s未満の場合、インテグレーターはリークされ(指定された速度で低下)、別のパラメーター ATC_RAT_RLL_ILMIおよび ATC_RAT_PIT_ILMI、それだけをリークさせます。ILMI、またはインテグレーターリーク最小値がゼロの場合、インテグレーターは成長できず、姿勢はソフトウェアの予測姿勢と正確に一致するように駆動されません。ただし、これがゼロ以外の場合、または低速でホバーしたときに発生する可能性のある姿勢エラーに対して十分な大きさである場合、実際の姿勢は予測姿勢を追跡します。リークとILMIパラメータの理由は、前方飛行にはより多くの積分器が必要になるためです。ただし、ホバー中、特に空中でのトランジション中に、大量のインテグレーターを許可すると、航空機が横向きに反転する可能性があります。
ピッチアンドロールチューニングパラメーターの初期設定
以下は、ヘリコプターの調整を開始するために使用する必要がある初期パラメーター値です。尾部については、以下のヨーセクションにある推奨パラメーターを使用してください。ヘリコプターは、デフォルトからテール設定を変更する必要がある場合に備え、ピッチとロールでFFを0.15に設定するだけで簡単に制御できます。
| ATC_ACCEL_P_MAX | 110000 | |
| ATC_ACCEL_R_MAX | 110000 | |
| ATC_ANG_PIT_P | 4.5 | |
| ATC_ANG_RLL_P | 4.5 | |
| ATC_RAT_PIT_D | 0 | |
| ATC_RAT_PIT_FILT / ATC_RAT_PIT_FLTE ** | 20 | |
| ATC_RAT_PIT_I | 0 | |
| ATC_RAT_PIT_ILMI | 0 | |
| ATC_RAT_PIT_IMAX | 0.40 | |
| ATC_RAT_PIT_P | 0 | |
| ATC_RAT_PIT_VFF | 0.15 | |
| ATC_RAT_RLL_D | 0 | |
| ATC_RAT_RLL_FILT / ATC_RAT_RLL_FLTE ** | 20 | |
| ATC_RAT_RLL_I | 0 | |
| ATC_RAT_RLL_ILMI | 0 | |
| ATC_RAT_RLL_IMAX | 0.40 | |
| ATC_RAT_RLL_P | 0 | |
| ATC_RAT_RLL_VFF | 0.15 | |
| ATC_INPUT_TC | 0.15 | |
**このパラメーター名はArduPilot 4.0以降で変更されました。
ヨー軸の調整(舵)
ピッチとロールを調整する前に、テールが適切に機能することを確認することをお勧めします。
重要な注意 -スポーツヘリコプターとは対照的に、UAVヘリコプターは通常、ヘッドスピードが低く、ディスクのローディングが高くなります。機械的に駆動されるテールの場合、これは通常のテール速度よりも低く、テールオーソリティが低下することも意味します。ヘリコプターがこの説明を満たしている場合は、最初のテストホバーの前にATC_RAT_YAW_VFFを0.05に設定することをお勧めし ます。
以下は、ヨーの現在のデフォルト設定です。ヘリを巻き取り、スタビライズフライトモードで地上.25メートルを超えないようにして、開始テールの設定をテストします。尾が「緩い」と思われ、保持したくない場合は、ATC_RAT_YAW_Pを増やします。尾が左右に急速に揺れる場合は、 ATC_ANG_YAW_Pを減らします。
すべての場合において、ATC_ANG_YAW_Pを3.5以下に、または ATC_RAT_YAW_Pを 0.38以上に調整することは推奨されません。ヘリコプターがこれらの制限内で安定したテールを達成できないように見える場合は、テールに機械的な問題がある可能性があります。過度の「スロップ」またはリンケージの遊び、リンケージのバインディング、またはサーボの問題です。ロールとピッチのチューニングに進む前に問題を修正してください。
| ATC_ACCEL_Y_MAX | 27000 |
| ATC_ANG_YAW_P | 4.5 |
| ATC_RAT_YAW_D | 0.003 |
| ATC_RAT_YAW_FILT / ATC_RAT_YAW_FLTE * | 20 |
| ATC_RAT_YAW_I | 0.12 |
| ATC_RAT_YAW_ILMI | 0 |
| ATC_RAT_YAW_IMAX | 0.33 |
| ATC_RAT_YAW_P | 0.18 |
| ATC_RAT_YAW_VFF | 0.024 |
- このパラメーター名は、ArduPilot 4.0以降で変更されました。
必要なピッチおよびロール応答の_FFおよびACCEL_x_MAXパラメーターの設定
ピッチ軸とロール軸の両方で、実際の航空機の速度が目的の速度と一致するようにFFゲインが設定されます。これを行うには、ピッチのP.desおよびP信号とロールのR.desおよびR信号を比較するために、ログのRATEメッセージが必要です。FFゲインが0.15に設定されている状態で、スタビライズフライトモードで離陸してホバーを確立し、ピッチとロールの両方で鋭いスティック入力を行います。microSDカードからログを取得してプルし、地上局のソフトウェアで信号を確認します。実際のレートが望ましいレートよりも高い場合は、FFを減らす必要があります。少ない場合は、FFを増やします。望ましいレートと実際のレートがいくらか相殺されている場合は、セットアップでスワッシュが適切にレベリングされていないか、CGが正しくないことを意味します。この場合、レートの変化が望ましい値と実際の値で同じであることを確認してください。 ATC_ACCEL_x_MAX パラメータと上記のプロセスを繰り返し、希望のレートと実際のレートを一致させます。
FFゲインの調整中に航空機が振動し始めたら、振動が停止するまでその軸のATC_ANG_xxx_Pゲインを減らします。ただし、ほとんどのヘリコプターでは、上記の推奨値はこの問題の原因にはなりません。
リンク率が通常は低いフライバーヘッドでは、ピッチとロールの両方で0.22 FFから開始することをお勧めします。FFで高くする必要がある可能性があります。しかし、フライバーのないヘッドの場合、サーボが本当に遅いか、リンケージレートが本当に遅い場合を除いて、FFは0.22以下でなければなりません。すべてのヘリコプターで、FFゲインはサーボとリンケージ速度の違いを補正します。
ATC_ACCEL_x_MAXパラメータの最終的な設定は、ヘリコプターのサイズによって異なります。大規模な800-900クラスのマシンは通常36000-52000の範囲になります。より小さい450-500クラスのマシンは、通常90000-110000の範囲になります。ATC_INPUT_TCパラメータを試して、航空機の初期応答を希望どおりに取得することもできます。ATC_INPUT_TCパラメータを0.15〜0.25 の範囲に保つことをお勧めし ます(RC_FEELAC
3.5以前の場合、推奨範囲は25〜50でした)。このプロセスが完了すると、航空機はスッキリとした速度で望ましい感触を持つはずです。
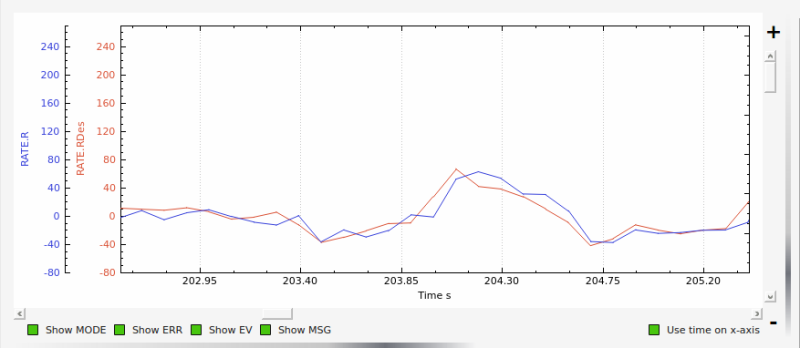
以下のグラフは、望ましいレートロールと実際のレートロールの例を示しています。ピークは高速スティック入力に対応し、ピークの振幅(高さ)はほぼ同じで、オフセットは100ミリ秒以下でなければなりません。
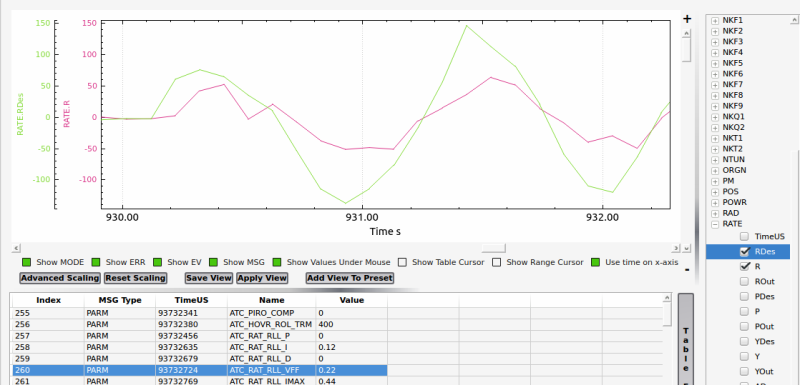
フライバーヘリコパーのチューニングに関する注意 -フライバーヘッドの場合、フライバーはレートPIDループの機械的バージョンです。したがって、フライバーはピッチとロールでFFのみを使用して調整されます。以下のトピックで言及されているレートDおよびPゲインは、フライバーではゼロに設定されたままです。I-gain、IMAX、およびILMIは、FBLと同じように調整されます。以下は、ATC_RAT_RLL_VFF = 0.22の開始設定を使用してフライバーヘリコプターで曲を開始するプロットです。グラフは、姿勢コントローラのレート要求に対する航空機の応答が低いことを示しています。つまり、適切なレート応答を実現するには、FF値を増やす必要があります。すべてのフライバーヘリコプターで、必ずH_FLYBAR_MODE = 1 を設定してください
DおよびPゲインの調整
FFゲインでヘリがうまく応答したら、PIDゲインを調整します。レートPIDコントローラーは安定性を提供し、外乱を排除し、ソフトウェアで予測されたレートに従って実際の航空機を維持します。
Dゲインから始めます。使用トランスミッターベースのチューニング ArduCopterの機能を。次のパラメータを変更します。
双葉ラジオの場合、これはノブの0.001の増分に相当します。
ATC_RAT_RLL_DおよびATC_RAT_PIT_Dのゲインが0.001になるまで、チューニングノブを調整します。ホバーに持ち上げて、鋭いスティック入力をロールします。ほとんどのヘリコプターはピッチ振動を見る前にロール振動を見るでしょう。そのため、ロール入力が推奨されます。振れない場合は、ゲインを0.001増やして、もう一度試してください。急速に揺れる値で、その値を半分に切り、ATC_RAT_RLL_DおよびATC_RAT_PIT_Dの最終調整値として入力し ます。ヘリを動かしてテストし、ピッチとロールの両方でスティックをすばやく動かして、安定していることを確認します。
次に、Pゲインを調整します。次のチューニングパラメータを変更します。
双葉ラジオの場合、これはノブの1増分を0.01に相当します。
ATC_RAT_RLL_PおよびATC_RAT_PIT_Pの ゲインが0.05になるまで、チューニングノブを調整します。ホバーに持ち上げ、積極的に左右に転がします。振れない場合は、ゲインを0.01増やして、もう一度試してください。急速に揺れる値で、その値を半分に切り、ATC_RAT_RLL_PおよびATC_RAT_PIT_Pの最終的な調整値として入力します。ヘリを動かしてテストし、ピッチとロールの両方でスティックをすばやく動かして、安定していることを確認します。
PとDのゲインを調整した後、航空機はよりスムーズに感じるはずです。
Iゲイン、IMAX、およびILMIの設定
設定することをお勧めしATC_RAT_PIT_Iのに等しいゲインをATC_RAT_PIT_VFFの ゲインとATC_RAT_RLL_Iのに等しいゲインATC_RAT_RLL_VFF利得。IMAX値は、姿勢の大きな外乱に対抗するために保存できる積分器エラーの量を制限します。ピッチ軸では、これは、高い前進速度で航空機の姿勢を保持するために必要なインテグレーター誤差によって設定されます。開始値は0.4です。これを確認するには、値をIMAX = 1に設定し、航空機を最大希望速度で飛行させます。ログをプルし、PIDPメッセージの最大I値を確認します。IMAXを最大値を超える0.1に設定します。ロール軸についても同じことができますが、通常は0.4で十分です。ILMIは、姿勢を維持するためにホバーに保持したいインテグレーターの最大量に設定されます。この値は0.1以下にすることをお勧めします
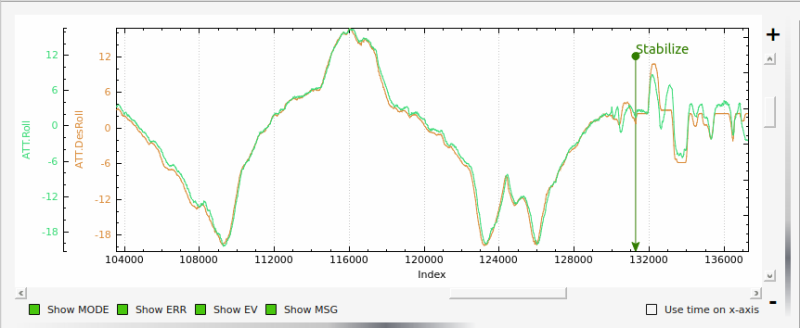
以下は、ILMIパラメータがゼロに設定された高速自律飛行におけるヘリコプターの望ましいロール姿勢と実際のロール姿勢のグラフです。IゲインおよびIMAXパラメータの効果は、適切に設定されており、ヘリコプターが5m / sを超える速度で2秒以上、目的の姿勢を非常に厳密に追跡します(「ダイナミックフライト」と呼ばれます)。ダイナミックフライトでは、1〜2度の範囲内である必要があります。グラフの右側に向かって、ヘリコプターがホバリングで停止し、パイロットがスタビライズフライトモードに切り替わりました。その時点での実際のロール姿勢と望ましいロール姿勢の違いに気づくでしょう。これは、ILMIをゼロに設定した場合の影響です。